Method for correcting errors of towed sonar system by utilizing neighbor interference
A towed sonar system technology, applied to radio wave measurement systems, instruments, etc., can solve the problems of lack of measurement and correction means, large error of towed sonar system, etc., to improve detection accuracy, strong applicability, simple and convenient operation Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as they do not constitute a conflict with each other.
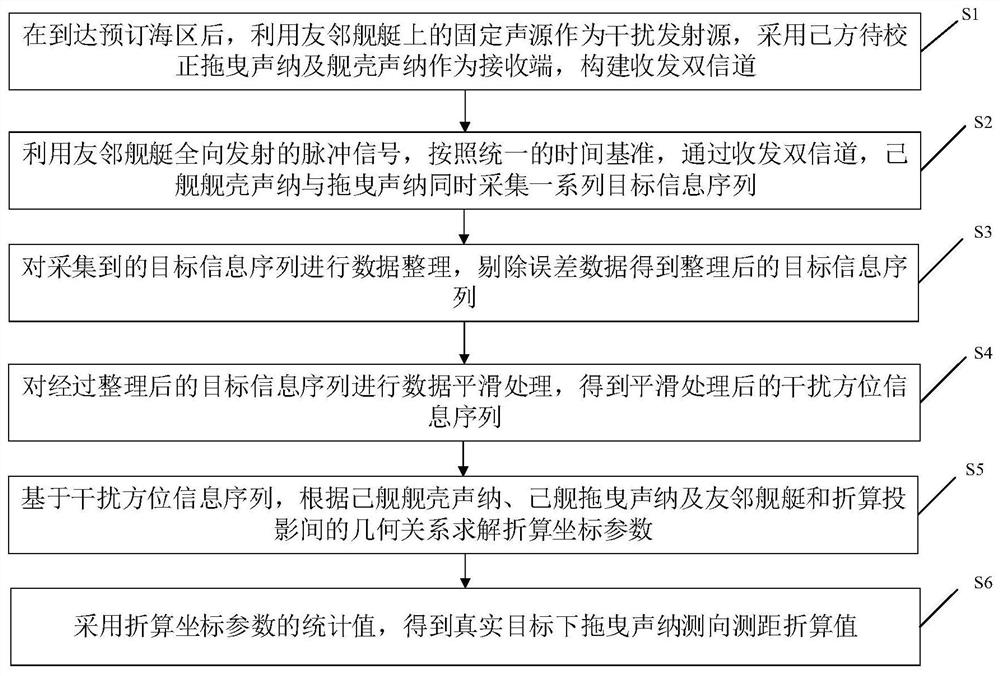
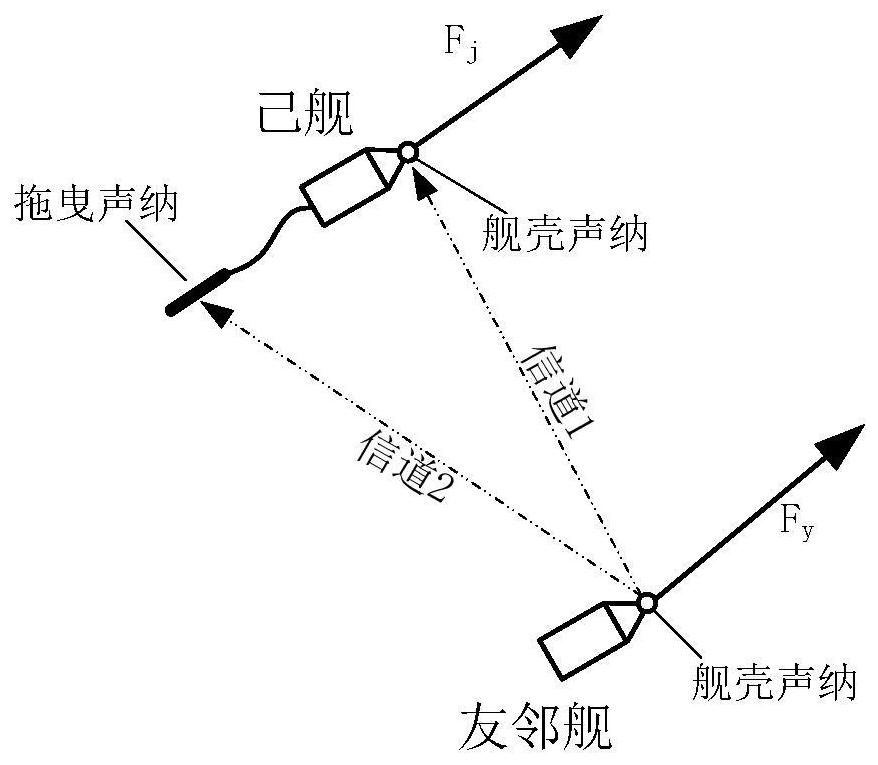
[0040] The present invention utilizes friendly neighbor fixed installation sound sources to transmit interference, constructs a fixed installation receiving base array of one's own side and a dual receiving channel of a towed sonar line array, performs filtering processing on the received direct wave signal, and uses a correction mathematical model to analyze the towed sound of one's own side. I...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More