

Point cloud registration model and method combining attention mechanism and three-dimensional graph convolutional network
A convolutional network, point cloud registration technology, applied in biological neural network models, image analysis, image data processing and other directions, can solve the problems of long training time and high time complexity of point clouds, saving time, high shape and The effect of size flexibility, information loss reduction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
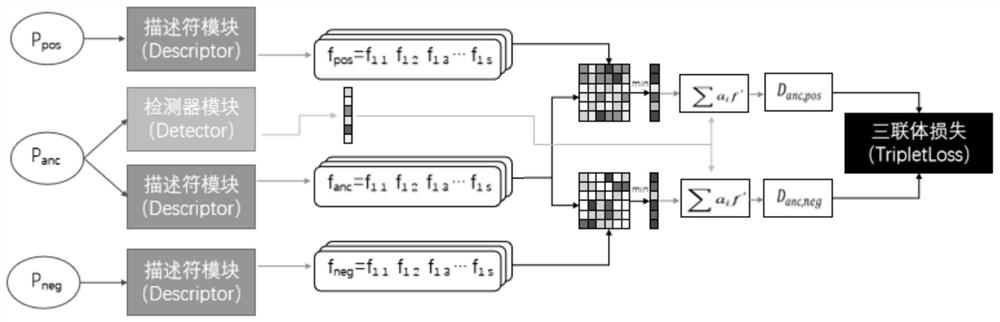
[0050] A point cloud registration model combining attention mechanism and 3D graph convolutional network, as shown in the attached figure 1 As shown, the model is a three-branch Siamese (Siamese) architecture, including a Detector model and a Descriptor model, and the Detector model is used to extract the attention features of points and construct an attention mechanism; the Descriptor model is used to generate The expression of the 3D depth feature is used to represent the 3D depth feature of the point, and learn to distinguish the depth feature of the point cloud.
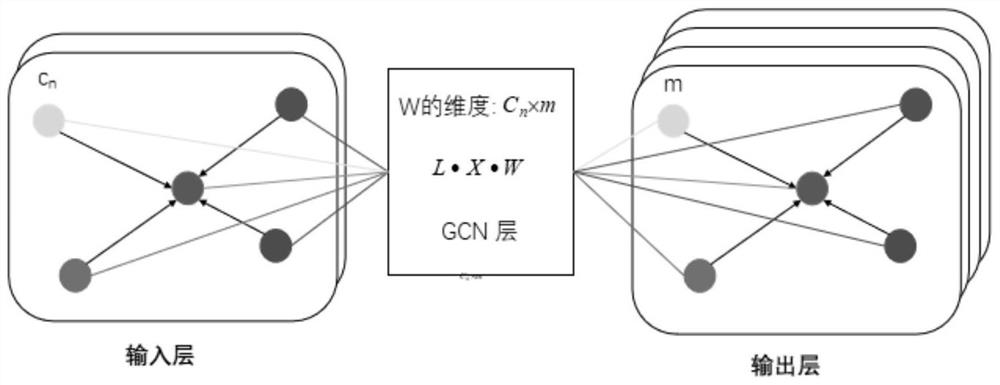
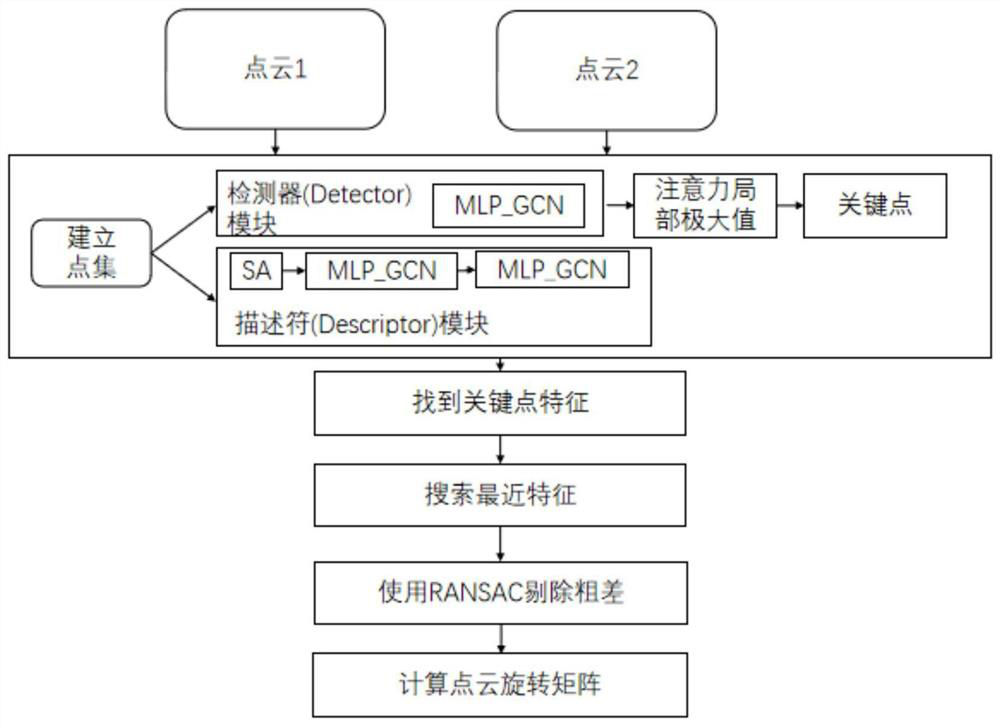
[0051] The Detector model mainly extracts and generates the attention feature of the point cloud through a graph convolutional network module MLP_GCN based on the spectral domain, and uses 5 complete connection layers (channels: 64, 64, 128, filter device: 1×1) to extract the initial point cloud features, and further realize the point cloud feature extraction function h(·). Then, the point cloud feature (X) is e...
Embodiment 2
[0068] Based on the above-mentioned embodiment 1, the registration method of the above-mentioned point cloud registration model includes the following steps: first perform model training, use feature alignment triplet loss to construct a loss function to train the model, and effectively extract attention features and descriptions from point clouds Descriptor feature; after model training, point cloud registration is performed.
[0069] During the model learning process, the Detector model generates an anchor point a anc =(a 1 ,a 2 ,...,a n ) attention vector. The Descriptor model generates the depth f of the anchor anc =(f anc_1 , f anc_2,fanc_3 ,..., f anc_n ), positive depth feature f pos =(f pos_1 , f pos_2 , f pos_3 ,..., f pos_n ), and the negative depth feature f neg =(f neg_1 , f neg_2 , f neg_3 ,..., f neg_n ). The four feature vectors are combined by feature alignment triplet loss to construct the objective function.
[0070] The construction of fea...
Embodiment 3
[0096] Based on the above-mentioned embodiment 2, it is carried out in a certain environment, using two public data sets, but it does not mean that the invention can only have such performance in this environment or this data set. This calculation example is intended to specifically demonstrate the comparison between this embodiment and other four existing point cloud registration methods.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More