

Intelligent surgical robot system based on optical coherence tomography
A technology of optical coherence tomography and surgical robots, applied in surgical manipulators, surgical robots, surgery, etc., can solve the problems of reducing the workload of doctors, not being able to assist other ophthalmic surgery, and not being able to perceive depth information, so as to improve safety and accuracy performance, improved accuracy and operability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to make the purpose, technical solution and advantages of the present application clearer, the present application will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present application, and are not intended to limit the present application.
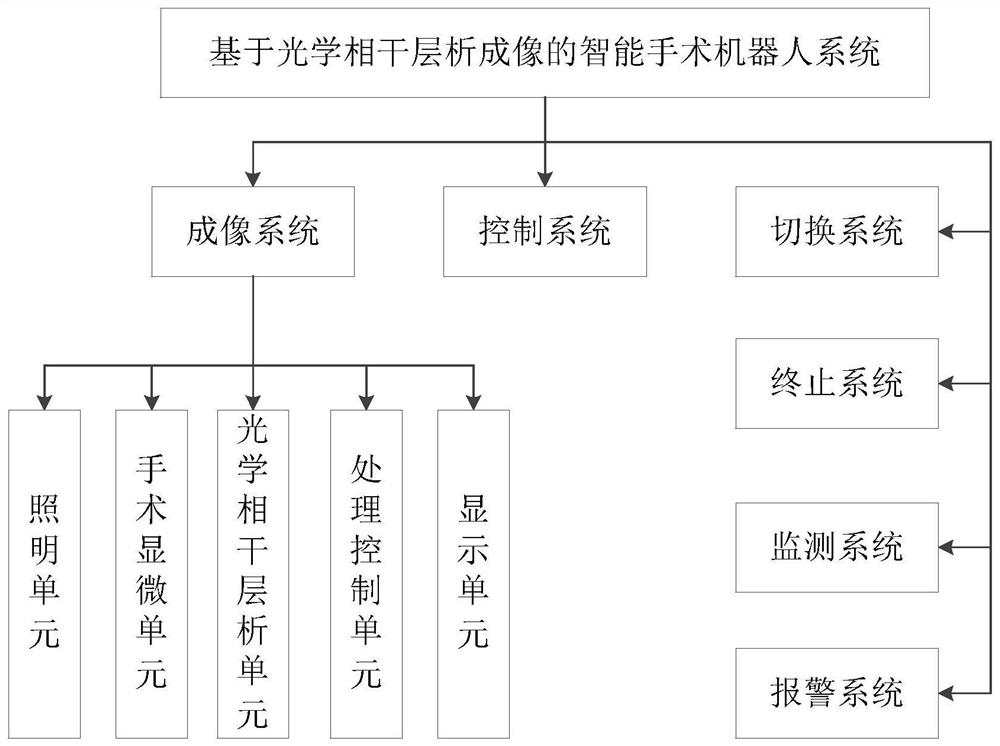
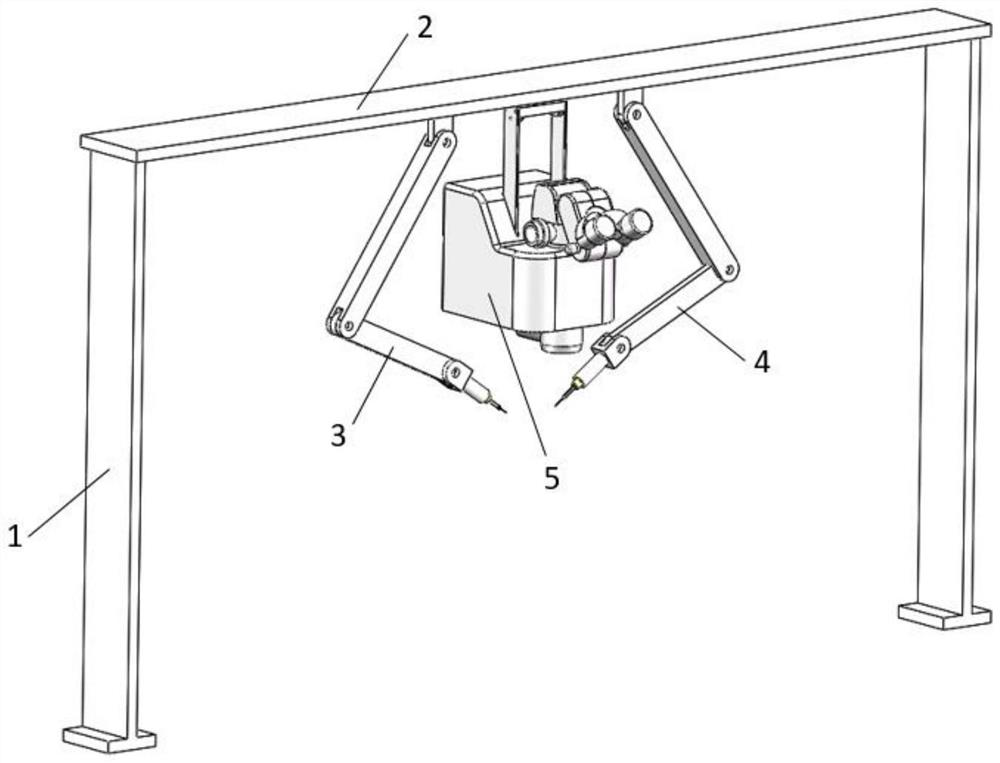
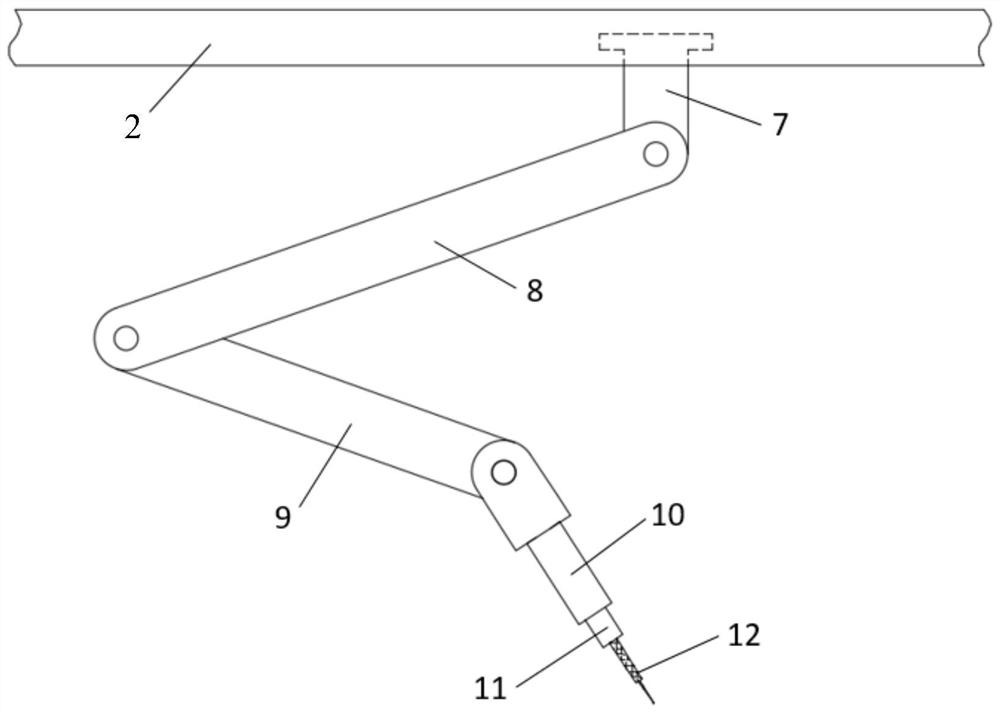
[0031] In one embodiment, combined with figure 1 , provides an optical coherence tomography-based intelligent surgical robot system, the surgical robot system includes an imaging system, a control system, and a robotic arm group that can hold surgical tools at the end;
[0032] The imaging system is used for two-dimensional microscopic imaging and optical coherence tomography three-dimensional imaging of the operation area;
[0033] The control system is used to control the movement of the robotic arm group to perform surgery based on the imaging results.
[0034] Here, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More