

A robot fish group formation control system and control method based on zigbee networking
A control system and control method technology, applied in the direction of specific environment-based services, transmission systems, network topology, etc., can solve the problems of low UUV detection efficiency, low detection accuracy, narrow detection range, etc., to improve detection efficiency and accuracy, Increase the search range and improve the effect of IntelliSense
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
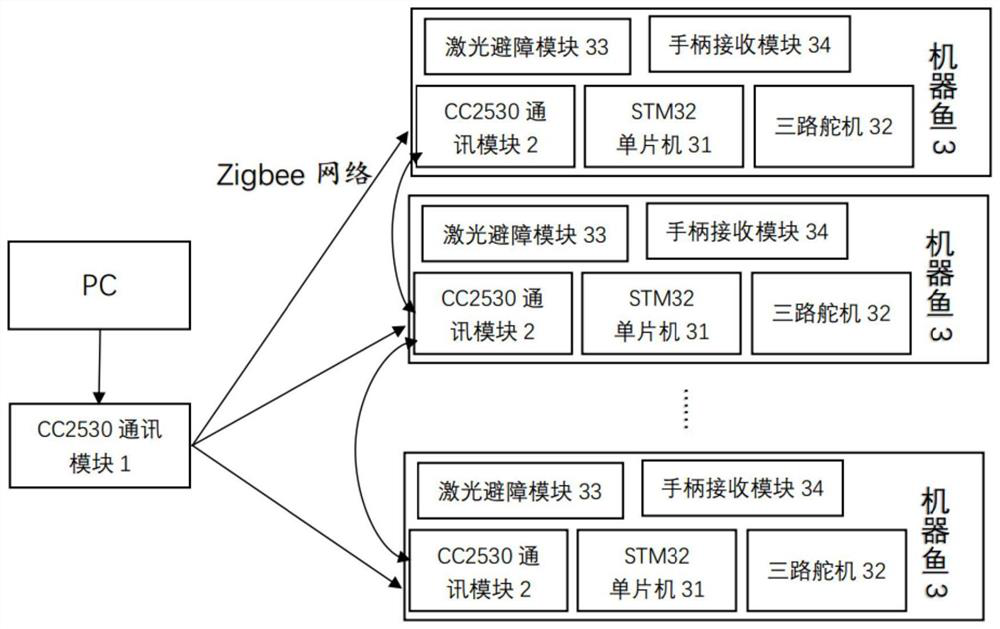
[0036] refer to figure 1 , an underwater robot cluster formation control system based on Zigbee networking, including a PC terminal, a CC2530 communication module 1 equipped with a Z-stack protocol stack, multiple CC2530 communication modules 2, and an underwater bionic robotic fish cluster. The underwater bionic robotic fish cluster includes a plurality of underwater bionic robotic fish 3, and the underwater bionic robotic fish 3 includes a robotic fish body, a CC2530 Zigbee communication module 2 mounted on the fish body, an STM32 single-chip microcomputer 31 and a driving steering gear 32. The STM32 single-chip microcomputer 32 is connected with the CC2530 communication module 2 through the serial port USART1, and connected with the three-way driving servo 32 through the GPIOB10, GPIOB11 and GPIOB12, and the PC is connected with the CC2530 communication module 1 through the serial port. Zigbee communication modules 1 and 2 can self-organize the network in broadcast, multica...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More