

Redundant mechanical arm kinematics solving method based on analytical solution and improved genetic algorithm
A technology for improving genetic algorithms and manipulators, applied in the field of robot kinematics, which can solve problems such as slow speed, low precision, and difficulty in solving redundant manipulators.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0076] The implementation mode of the present invention is illustrated by specific specific examples below, and those who are familiar with this technology can easily understand other advantages and effects of the present invention from the contents disclosed in this description. Obviously, the described embodiments are a part of the present invention. , but not all examples. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
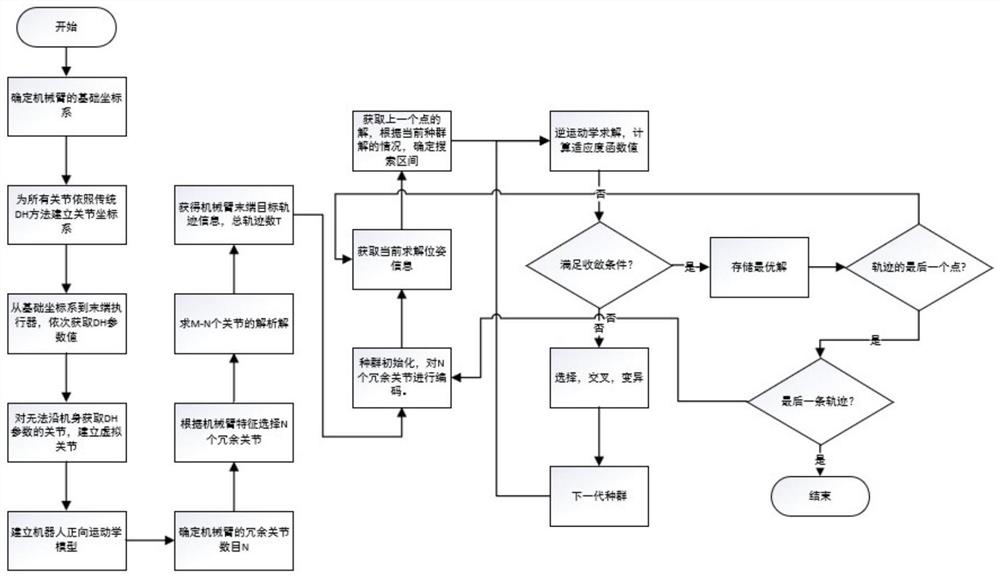
[0077] A method for calculating the kinematics of a redundant manipulator based on an analytical solution and an improved genetic algorithm, comprising the following steps:
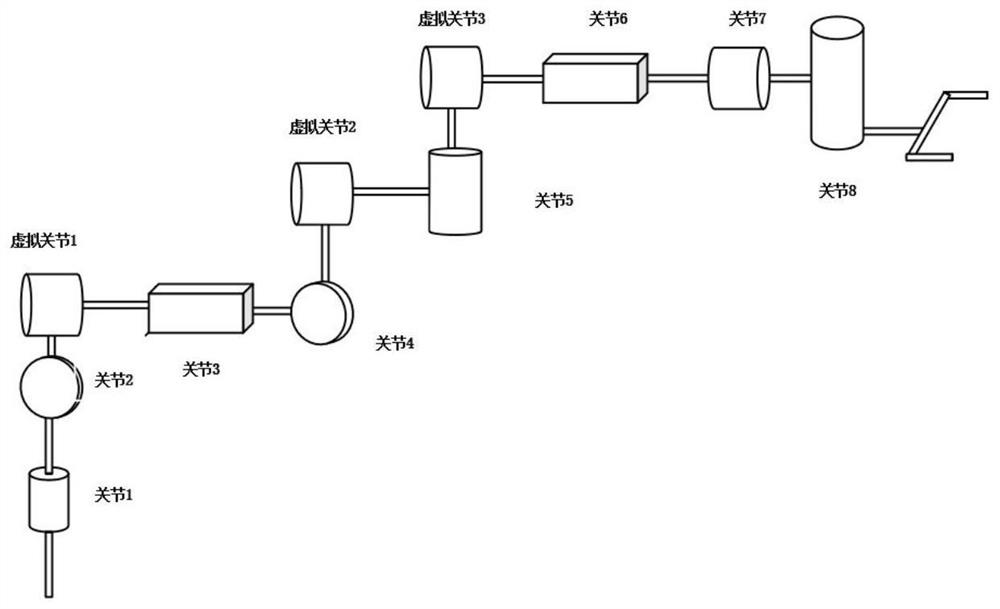
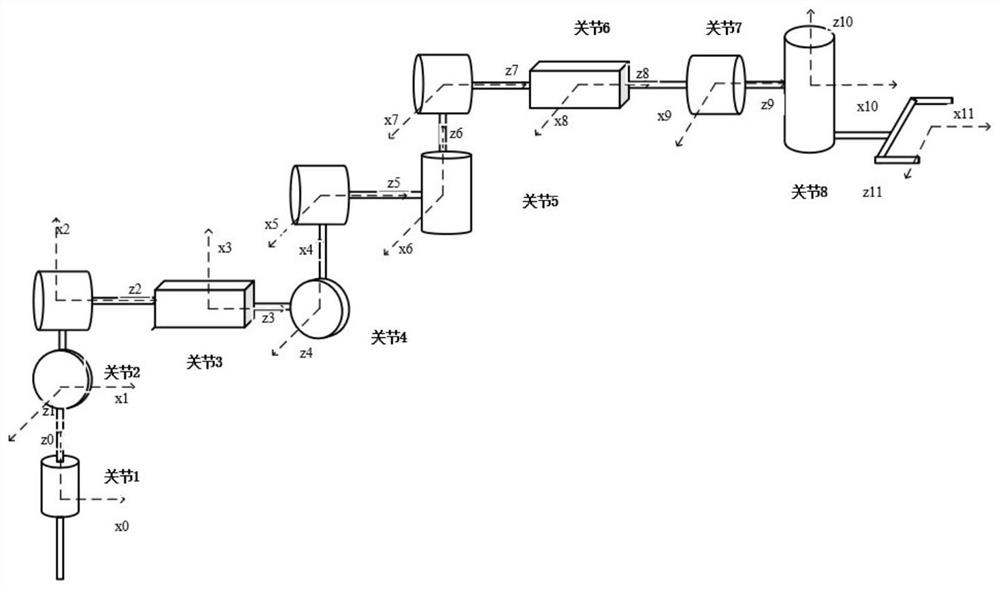
[0078] S1. Establish the coordinate system of each joint of the manipulator, and set the global coordinate system, establish the D-H parameter table through the traditional D-H modeling method, and introduce virtual joints a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More