Manned air shaft inspection robot and air shaft inspection method
A technology for inspection robots and wind shafts, which is applied in the field of robots, can solve problems such as low battery power, skewed shafts, and deformation of the guiding device of the lifting system, and achieve the effect of improving efficiency and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
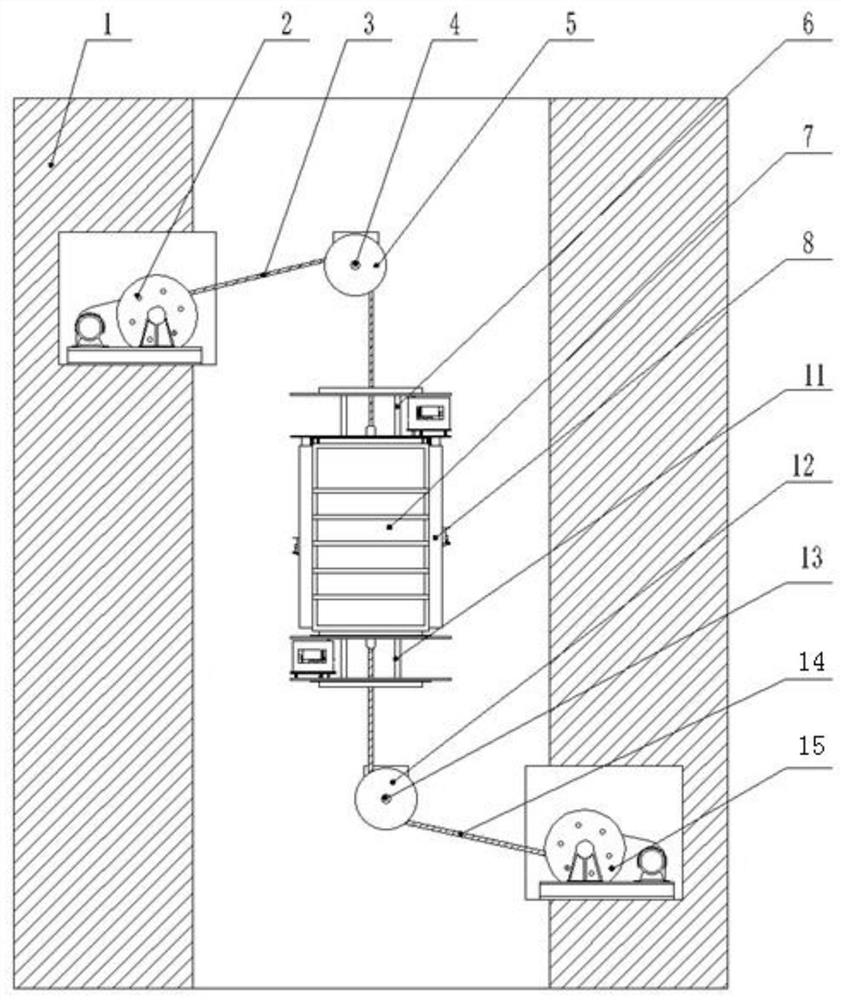
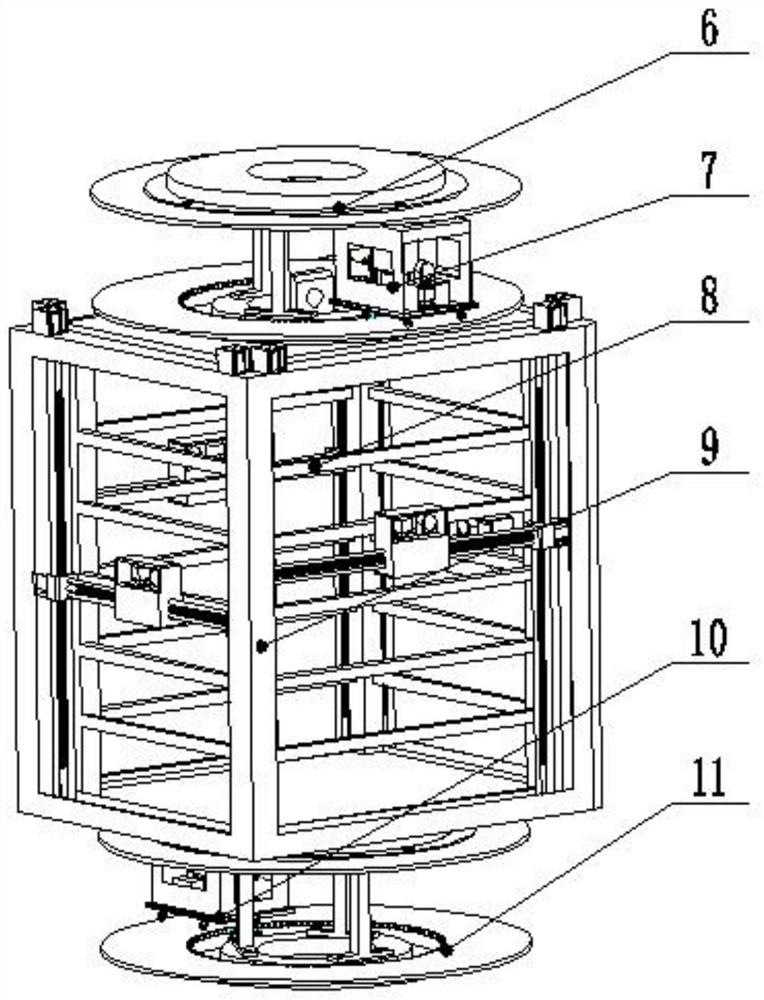
[0062] Such as Figures 1 to 4 As shown, the manned wind shaft inspection robot described in this embodiment includes a reel driving device, a manned device 8, a manned device inspection device 9, and a robot body, wherein:
[0063] The reel drive device described in this embodiment includes an upper reel drive device 2 and a lower reel drive device 15; the upper reel drive device 2 is arranged at the wellhead, and the lower reel drive device 15 is arranged at the bottom of the well;
[0064] The upper reel driving device 2 described in this embodiment includes an upper power device, an upper sky wheel 5, an upper sky wheel shaft 4 and an upper driving rope 3;
[0065] The power device described in this embodiment includes an industrial motor, a reducer, a reel, and an explosion-proof casing; the industrial motor is connected to the reel through the reducer, and an explosion-proof casing is installed outside the whole;
[0066] The lower reel driving device 15 described in th...
Embodiment 2
[0080] In order to solve the cost problem of the robot, this embodiment has made further improvements on the basis of Embodiment 1, and modified the arrangement position of the reel drive device, and the upper reel drive device 2 and the lower reel drive device 15 is arranged on the wellbore wall through the carrier frame.
[0081] The following will combine Figure 5 Detailed description The manned wind well inspection robot described in this embodiment includes a reel driving device, a manned device 8, a manned device inspection device 9, a robot body, an upper carrier 17, an upper carrier bracket 18, Lower carrier 20, lower carrier bracket 21, wherein:
[0082] The upper bearing frame 17 described in this embodiment is connected to the upper wellbore wall by pins, a carrier bracket is installed below the upper bearing frame 17, and an industrial motor and a reducer are installed on the wall bearing frame. The upper drum 16 is arranged in the middle of the shaft through th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com