

Method for quickly correcting deep sea inertial navigation orientation
An azimuth and deep-sea technology, applied in the field of inertial navigation, can solve the problems of strapdown inertial navigation system, such as weak azimuth observability and slow convergence speed of azimuth misalignment angle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The present invention will be described in detail below with reference to the accompanying drawings and examples.
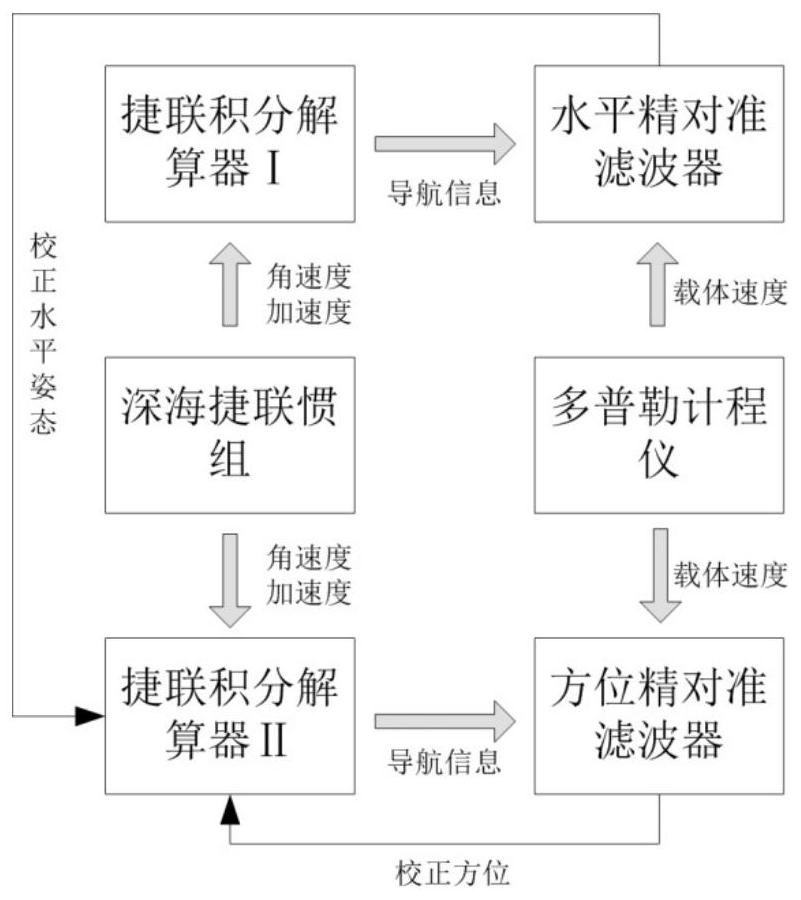
[0061] The present invention provides a method for quickly correcting the azimuth of deep-sea inertial navigation, the principle of which is as follows: figure 1 shown, including the following steps:
[0062] S1. The carrier is equipped with a strapdown inertial navigation system and a Doppler log DVL; the strapdown inertial navigation system includes two parallel strapdown integral solvers, respectively the first solver I and the second solver Device II. The strapdown integral solver is the solving program of the strapdown inertial navigation system.
[0063] S2. Construct a horizontal fine alignment filter, and use the output of the first resolver I and the Doppler log DVL to estimate the horizontal misalignment angle.
[0064] In the embodiment of the present invention, S2 includes the following specific steps:
[0065] S201. Constructing a horizont...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More