

Road target detection method and device, equipment and vehicle
A detection method and road technology, applied in neural learning methods, instruments, biological neural network models, etc., can solve problems such as poor detection accuracy and poor real-time performance, and achieve the effect of ensuring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
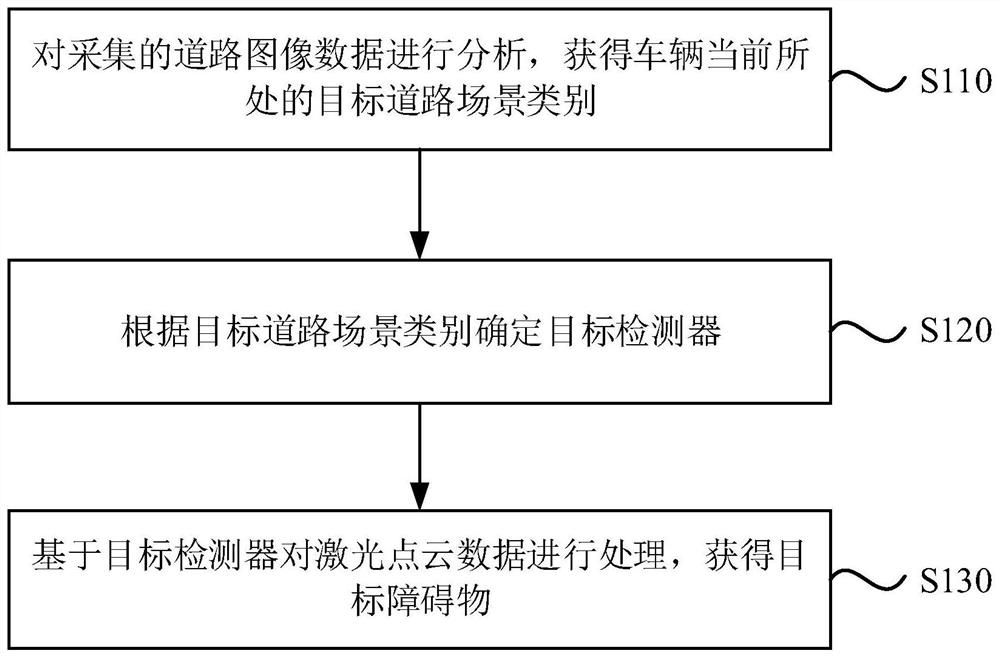
[0042] figure 1 It is a flow chart of a road object detection method provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation of identifying objects around the vehicle. This method can be executed by a road object detection device, such as figure 1 As shown, the method specifically includes the following steps:
[0043] Step 110, analyzing the collected road image data to obtain the target road scene category where the vehicle is currently located.
[0044] Among them, the road image data can be collected by the vehicle camera. The road scene category may include simple road scenes (such as highway scenes) and complex road scenes (such as urban road scenes).
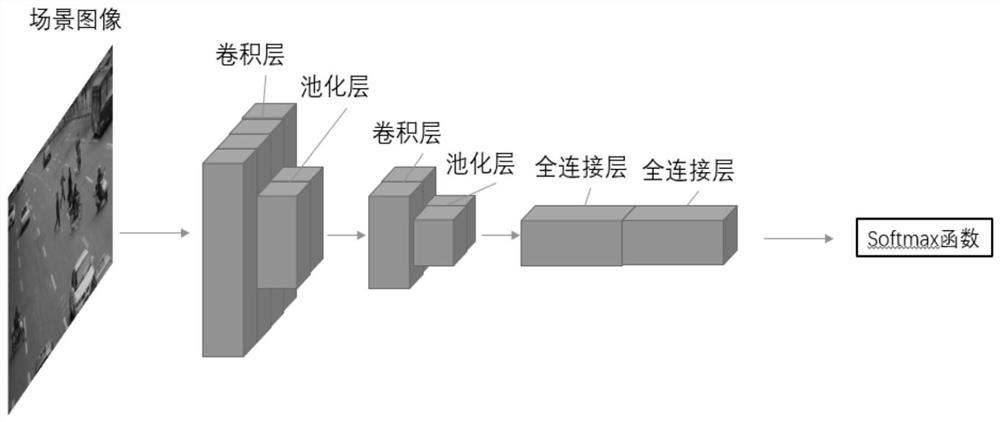
[0045] Specifically, the method of analyzing the collected road image data to obtain the road scene category where the vehicle is currently located may be: input the collected road image data into the road scene classifier, and output the multiple road scene categories where the...
Embodiment 2
[0059] Figure 5 It is a schematic structural diagram of a road object detection device provided in Embodiment 2 of the present invention. Such as Figure 5 As shown, the device includes: a target road scene category acquisition module 210 , a target detector determination module 220 and a target obstacle acquisition module 230 .
[0060] The target road scene category acquisition module 210 is used to analyze the collected road image data to obtain the target road scene category where the vehicle is currently located;
[0061] Target detector determination module 220, for determining the target detector according to the target road scene category;
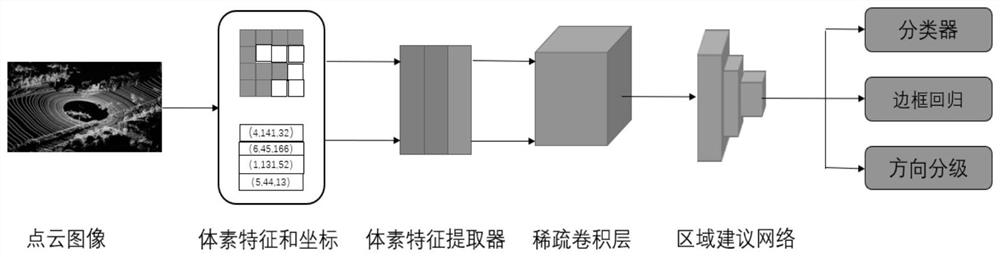
[0062] The target obstacle obtaining module 230 is configured to process the laser point cloud data based on the target detector to obtain the target obstacle.
[0063] Optionally, the target road scene category acquisition module 210 is also configured to: input the collected road image data into the road scene classifier, and...
Embodiment 3
[0076] Image 6 It is a schematic structural diagram of a computer device provided by Embodiment 3 of the present invention. Image 6 A block diagram of a computer device 312 suitable for implementing embodiments of the invention is shown. Image 6 The computer device 312 shown is only an example, and should not impose any limitation on the functions and scope of use of the embodiments of the present invention. Device 312 is a typical computing device for road object detection functions.
[0077] Such as Image 6 As shown, computer device 312 takes the form of a general-purpose computing device. Components of computer device 312 may include, but are not limited to: one or more processors 316, storage 328, bus 318 connecting various system components including storage 328 and processor 316.
[0078] Bus 318 represents one or more of several types of bus structures, including a memory bus or memory controller, a peripheral bus, an accelerated graphics port, a processor, or a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More