

Material transfer device reinforcement learning control method based on state and disturbance estimation
A technology of reinforcement learning and control method, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the difficult requirements of control accuracy and response speed, weak ability to adapt to changes in system parameters, and high-performance control of hydraulic systems Difficulties and other problems to achieve the effect of improving self-adaptation and self-learning ability, improving control performance, and improving reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be further introduced below in conjunction with the accompanying drawings and specific embodiments.
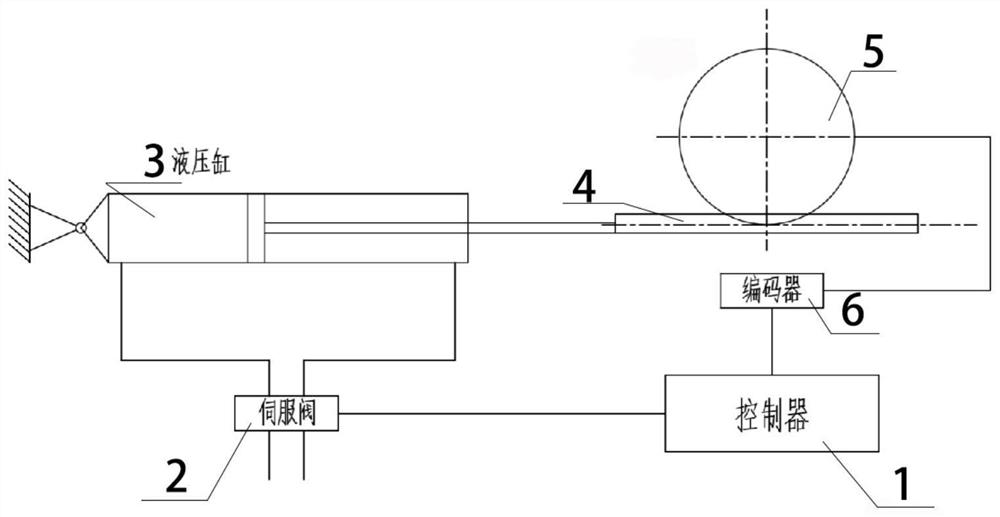
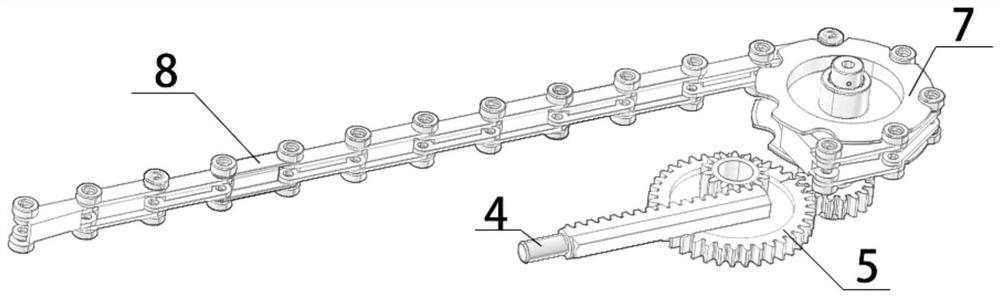
[0019] combine Figure 1-Figure 2 , The material transfer device is mainly composed of a controller 1, a hydraulic servo valve 2, a hydraulic cylinder 3, a rack 4, a gear 5, an encoder 6, a sprocket 7, and a chain 8. The chain 8 meshes with the sprocket 7, and the sprocket 7 passes through The transmission gear meshes with the gear 5, the gear 5 meshes with the rack 4, the rack 4 is connected with the hydraulic cylinder 3, and the rotation of the gear 5 is driven by the linear motion of the rack 4 connected with the hydraulic cylinder 3; the gear 5 and the sprocket 7 pass through Transmission gear transmission, the rotation of the sprocket 7 drives the chain 8 to reciprocate, and the material transfer function is realized through the reciprocating motion of the chain 8; the movement of the hydraulic cylinder 3 is realized by the servo valve 2 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More