

A Pointing and Tracking Control Method for a Flexible Satellite Containing a 6-DOF Vibration Isolation Platform
A vibration isolation platform and flexible satellite technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., to achieve high-precision and high-stability pointing tracking control, suppression of flexible vibration, and the effect of large-scale engineering application value
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0092] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
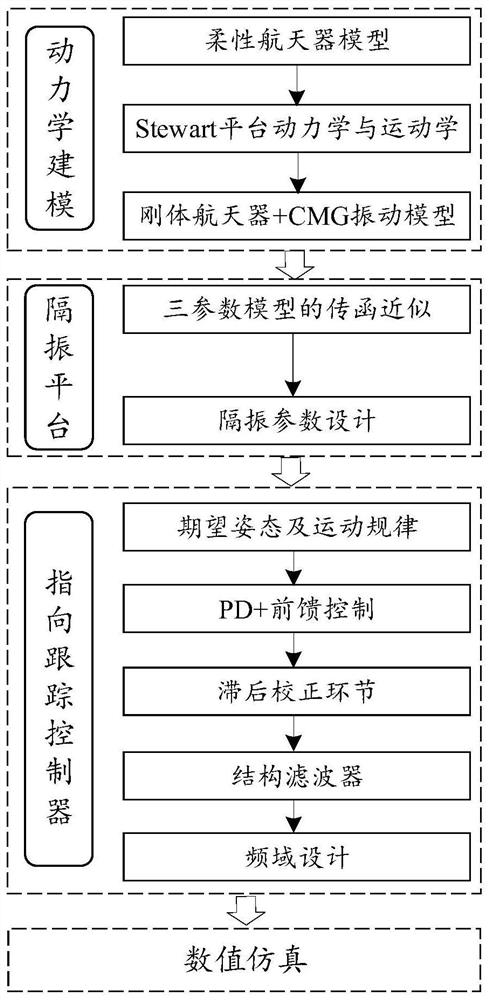
[0093] like figure 1 As shown in the present invention, a flexible satellite pointing and tracking control method containing a six-degree-of-freedom vibration isolation platform, the specific implementation steps are as follows:
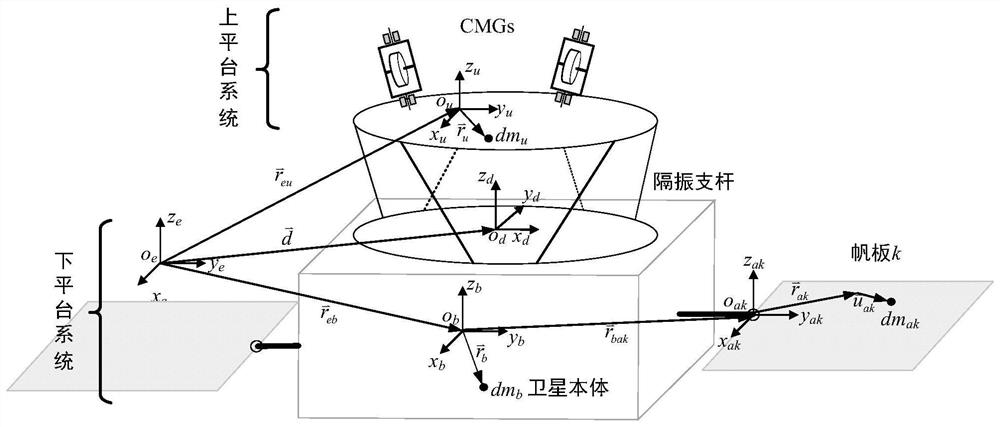
[0094] Step 1: According to figure 2 In the system shown, the dynamic model of the upper and lower platforms of the flexible satellite with a six-degree-of-freedom vibration isolation platform is established.
[0095] Neglecting the external disturbance to the upper platform system, considering the static and dynamic unbalance of the rotor of the control moment gyroscope, the non-perpendicularity and disintersection of the frame axis and the rotor axis, the dynamic equation of the vibration-isolated upper platform system is as follows:
[0096]
[0097]
[0098]
[0099] Among them, v u Indicates that th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More