

Structure sharing multi-sensor fusion positioning system for automatic driving vehicle
A multi-sensor fusion and positioning system technology, which is applied in the field of structure-sharing multi-sensor fusion positioning system for self-driving vehicles, can solve vehicle optimization pose deviation, does not consider the influence of lidar constraints, and is difficult to meet the positioning accuracy requirements of self-driving vehicles To achieve the effect of improving accuracy and robustness, improving positioning accuracy and robustness, and benefiting accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The present invention will be described in further detail below in conjunction with the embodiments given in the accompanying drawings.
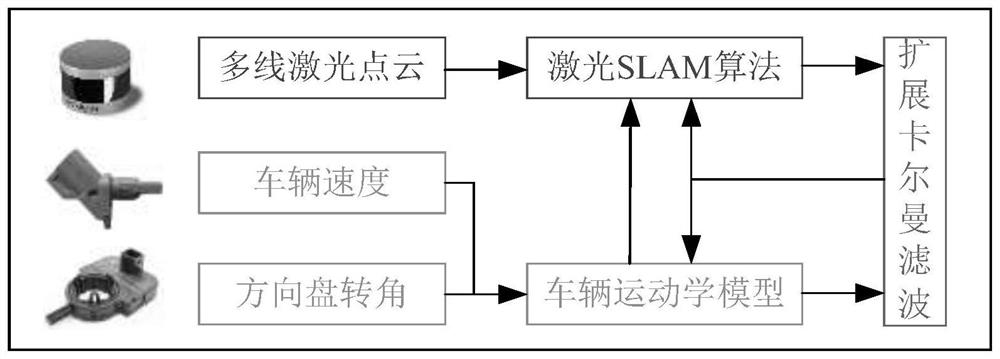
[0053] Such as figure 1 As shown, the structure-sharing multi-sensor fusion positioning algorithm architecture diagram for autonomous vehicles contains three modules: vehicle kinematics model module, laser SLAM algorithm module and extended Kalman filter module.
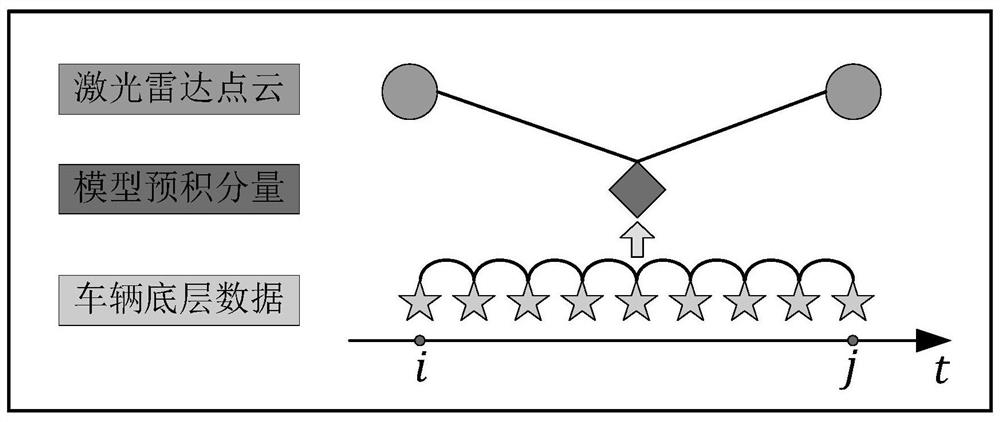
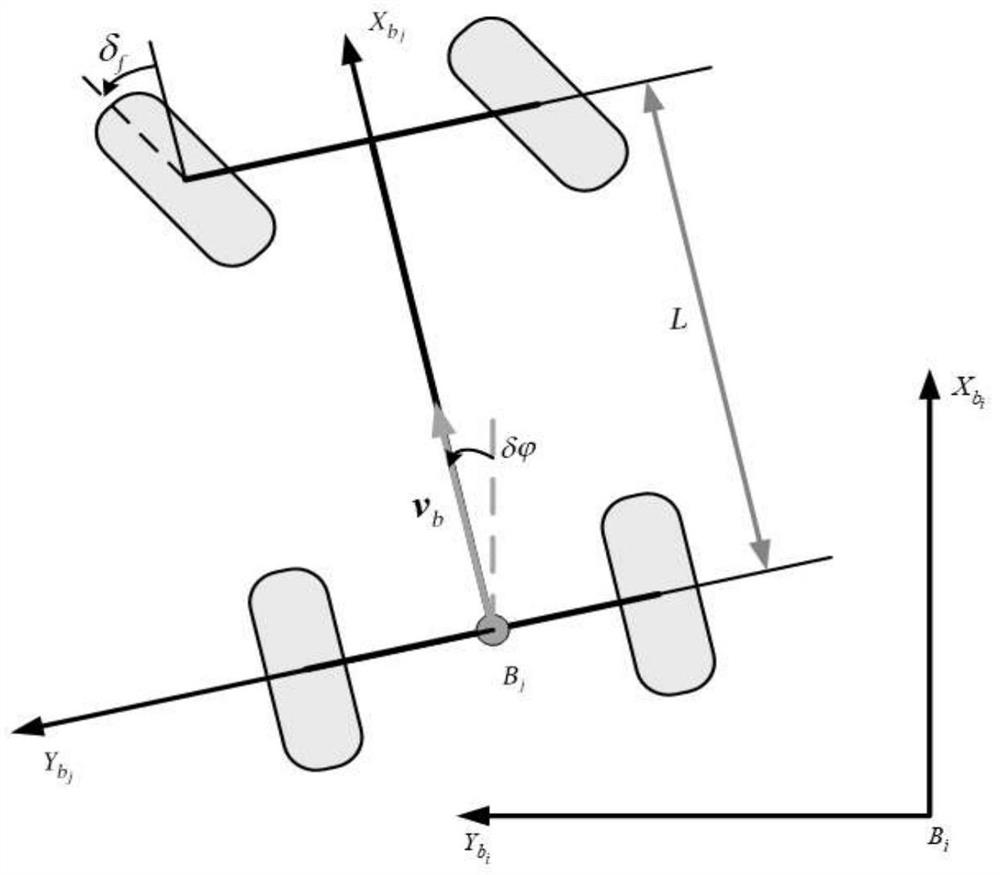
[0054] The input of this positioning system consists of three sensors: multi-line lidar, wheel speed sensor and steering wheel angle sensor. Based on the optimized pose of the vehicle provided by the extended Kalman filter module at the previous moment, the pose of the autonomous driving vehicle is optimized by using the laser point cloud data and the data of the wheel speed sensor and the steering wheel angle sensor between the corresponding moments of the two frame point clouds. At time j, the state quantity of the system to be optimized is defined as follows:
[0055] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More