Soft body grabbing device and method based on artificial muscle driving
A technology of artificial muscles and grasping devices, which is applied in the field of flexible robots, can solve the problems that the overall structure cannot be miniaturized, it is difficult to realize miniaturization and light weight, and it is not suitable for large-scale applications, so as to reduce the overall price cost and time cost, The appearance is neat and tidy, and the effect of miniaturization is realized
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
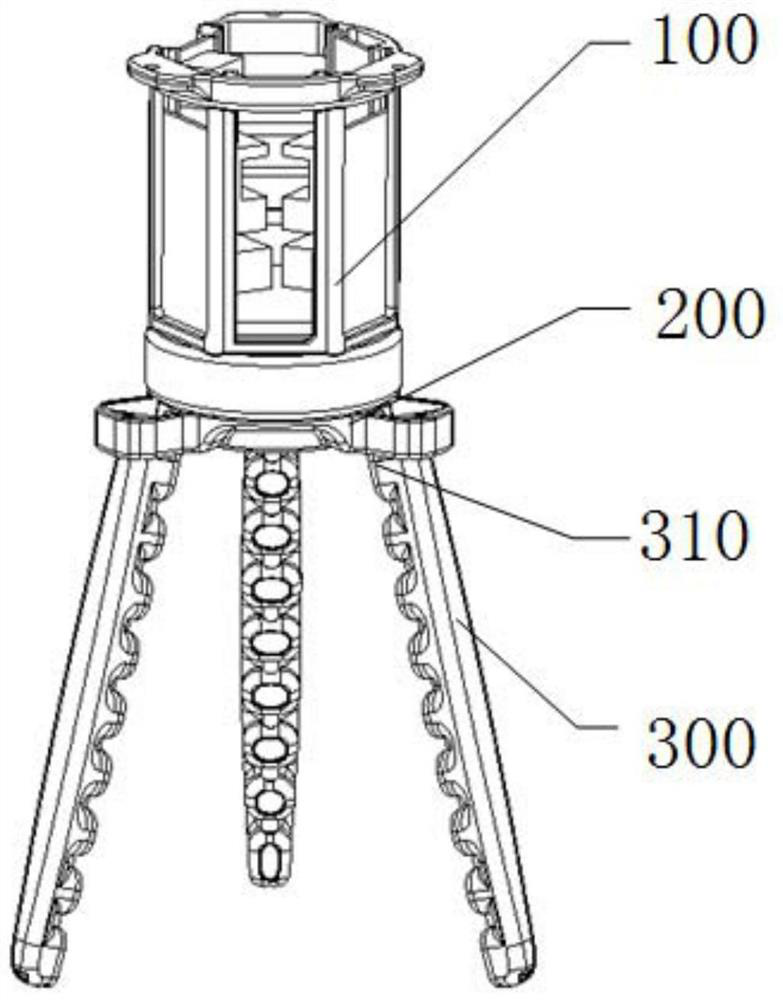
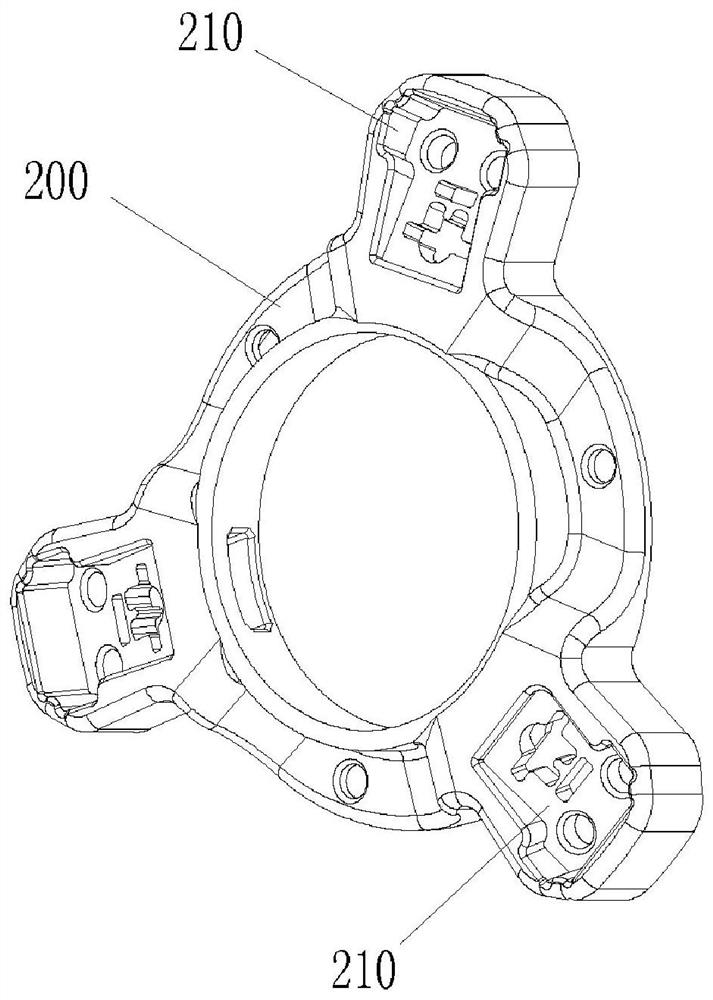
[0052] A soft grasping device driven by artificial muscles, such as figure 1 As shown in -6, it includes an arm 100, a palm 200 and three soft fingers 300. The palm 200 is set on the arm 100, and the three soft fingers 300 are set on the palm 200 in an evenly distributed manner.
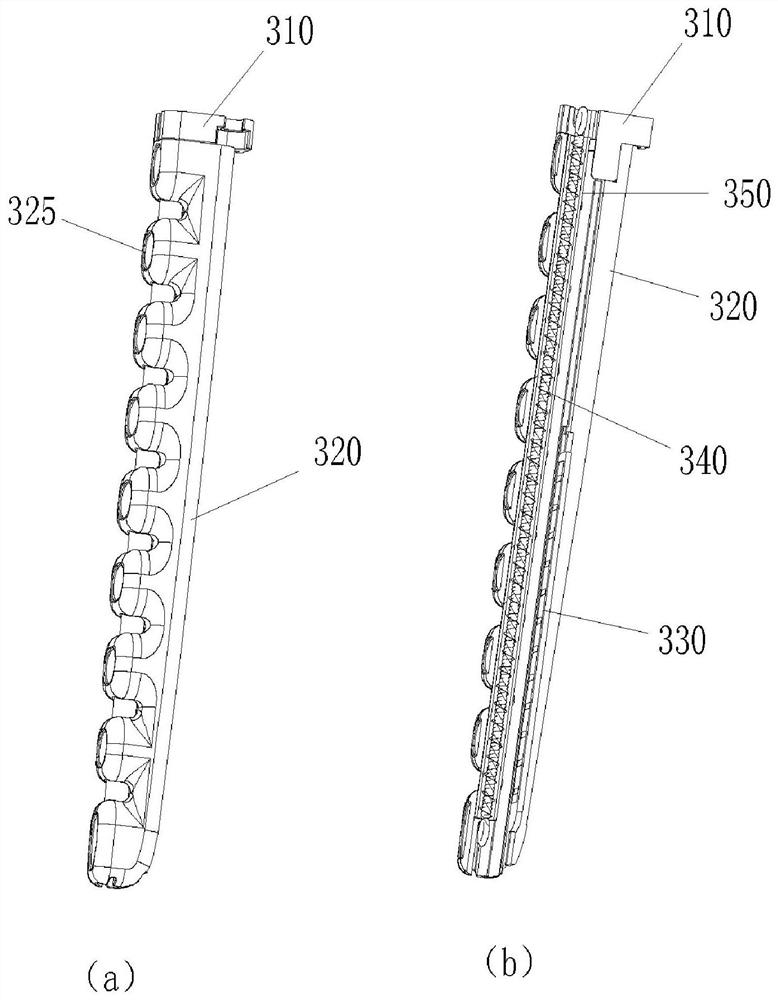
[0053] The soft finger 300 includes an end cap 310, a finger body 320, a bending sensor 330, an artificial muscle 340, and a high-temperature-resistant tube 350. The finger body 320 is connected to the palm 200 through the end cap 310. The finger body 320 is equipped with The first slot 321, the second slot 322, the third slot 323, such as Figure 4 , 5 As shown, among them, Figure 5 a is a longitudinal sectional view of the finger body 320, Figure 5 b is a transverse cross-sectional view of the finger body 320. The artificial muscle 340 is set in the first slot 321 after being set in the high temperature resistant tube 350 and is located on the grasping front of the finger body 320. The bending...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More