

A 3D Point Cloud Registration Method with Low Overlap Rate
A 3D point cloud and overlap rate technology, applied in image analysis, image enhancement, instruments, etc., can solve the problems of difficulty and low accuracy in the registration of two point clouds, achieve superior registration accuracy and time efficiency, narrow the search Scope, the effect of reducing the amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
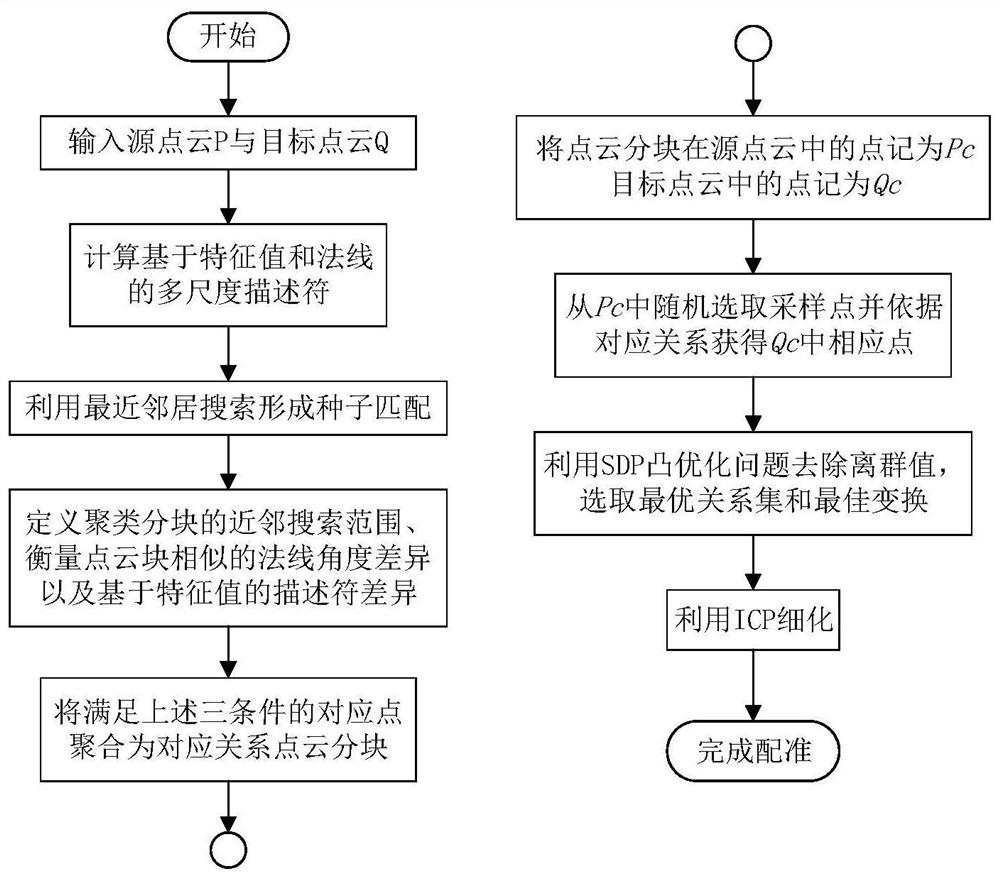
[0064] Such as figure 1 As shown, a low overlap rate 3D point cloud registration method includes the following steps:
[0065] Step 1, construct multi-scale descriptors based on curvature features and normal vectors;
[0066] Step 1.1, for each query point P in each neighborhood radius r l Build the covariance matrix,
[0067]
[0068] Among them, the scale l=1,...,L; the neighborhood radius corresponding to the scale is expressed as r 1 2 L , S l Indicates that the distance from the query point P is within the neighborhood radius r l The set S of points in the range l ={P i |||P i -P||≤r l};
[0069] Step 1.2, use the singular value decomposition algorithm SVD decomposition formula (1) to obtain three eigenvalues λ l1 ≥λ l2 ≥λ l3 and its corresponding eigenvector n l1 , n l2 , n l3 , the eigenvector n corresponding to the smallest eigenvalue l3 That is, the normal vector of the plane, denoted as n l ;Set the direction of the normal vector of the area to ...
Embodiment 2
[0108] The data comes from the 3D point cloud model published by Stanford University and the entity 3D scanning data from the geometryhub website. The environment is a 64-bit operating system of Windows 10 and a development platform of MATLAB 2018b.
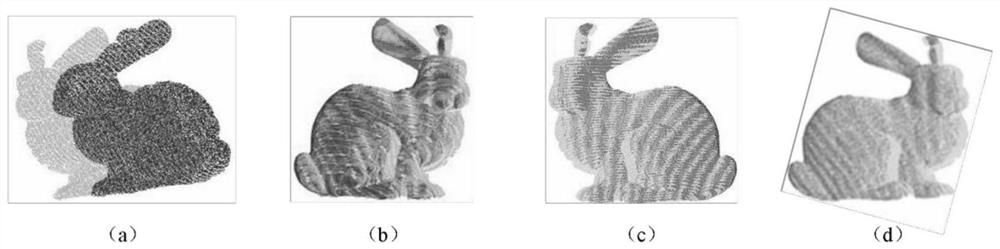
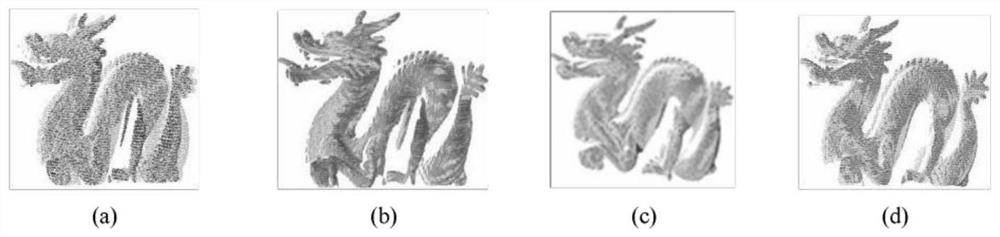
[0109] When the overlap rate of the source point cloud and the target point cloud is lower than 60%, the degree of overlap of the two point clouds is low, and when their overlap rate is higher than 60%, the degree of overlap is high. In order to prove the effectiveness of the method proposed by the present invention, it is divided into two cases with high overlap rate and low overlap rate.
[0110] For the point cloud model, the point cloud data acquired under different viewing angles are used to reflect their overlapping ratio. Select several representative sets of data for the results display. Point cloud data with high overlap rate: Bunny000, Bunny045 and Dragon000, Dragon024 two sets of point cloud data, they have obvious o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More