Star map identification method based on simplest general subgraph
A star map recognition and sub-map technology, applied in the aerospace field, achieves good application prospects, good robustness, and improved efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
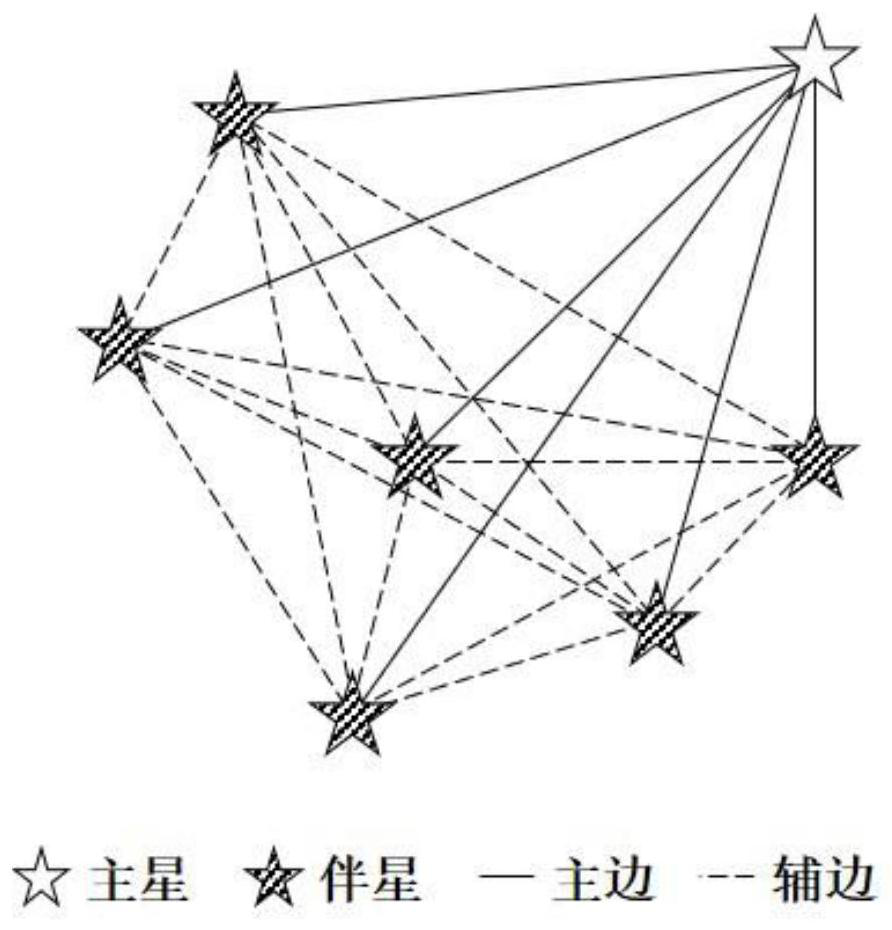
[0047] In order to better understand the present invention, the subgraph structure is defined first.
[0048] Such as figure 1 As shown in , the selected observation star is the vertex of the subgraph, and one of the observation stars is defined as the main star, and the rest are companion stars; the angular distance between the observation stars is the edge of the subgraph, and the angular distance from the main star to the companion star is defined as the main edge , the angular distance between the companion stars is the secondary side. If all edges of a subgraph are primary edges, define it as a group structure subgraph, and define a subgraph formed by adding several auxiliary edges to a group structure subgraph as a general subgraph. It should be noted that general subgraphs contain group structure subgraphs. The key to the subgraph isomorphism method to directly and efficiently realize star map recognition is to select a reasonable subgraph to screen candidate stars. Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



