

Switch and protection circuit for exoskeleton robot
An exoskeleton robot and protection circuit technology, applied in safety/protection circuits, protection for undervoltage or no voltage response, circuit devices, etc., can solve problems such as low safety, large size, and sparking phenomenon, and achieve Flexible switch selection, flexible control methods, and the effect of reducing the size of the switch
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
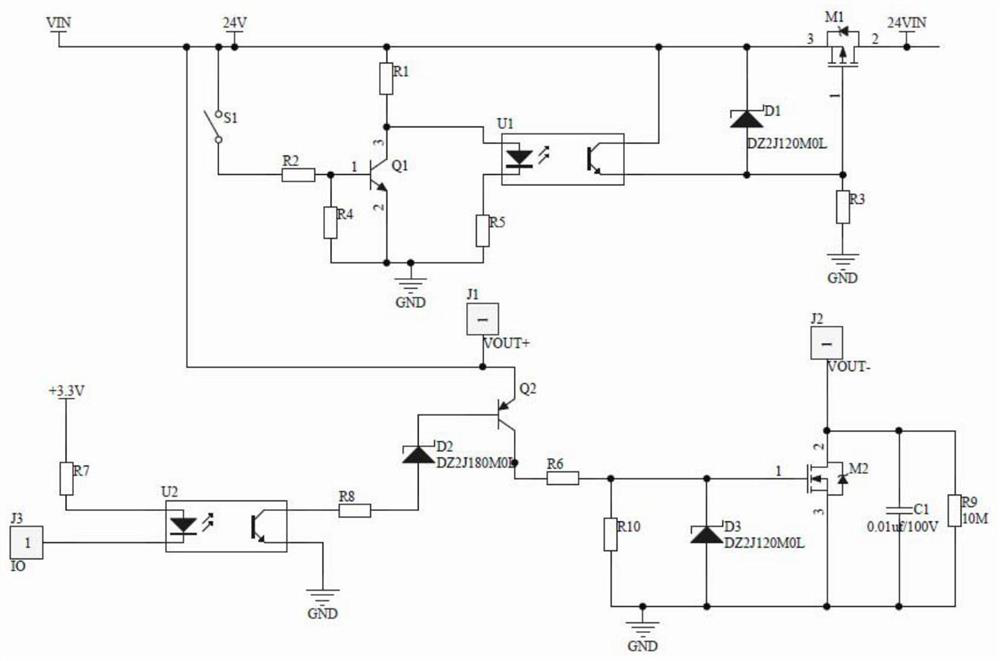
[0019] The invention relates to a switch and protection circuit for an exoskeleton robot, including a control electric switch circuit, a power electric switch circuit and a power electric undervoltage protection circuit.
[0020] After the input voltage is connected, it is divided into two circuits, one for the control chip, low-power step-down power supply and other low-power control electrical parts, and the other for exoskeleton motors, drivers and other high-power electrical equipment powered by. The switch circuit of the control power realizes the power-on or power-off of the control power through the closing or opening of the external button switch. The power electricity reaches the output interface after passing through the power electric switch circuit and the undervoltage protection circuit, and supplies power for the power equipment of the external driver. The power switch circuit can control the closing or opening of the switch by sending high and low level signals...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More