

A humanoid robot waist joint and its realization method
A humanoid robot and waist technology, applied in the direction of manipulators, manufacturing tools, joints, etc., can solve the problems of difficulty in maintaining the balance of waist force, difficulty in motor control, poor balance effect, etc., to improve dynamic characteristics, reduce control difficulty, low cost effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
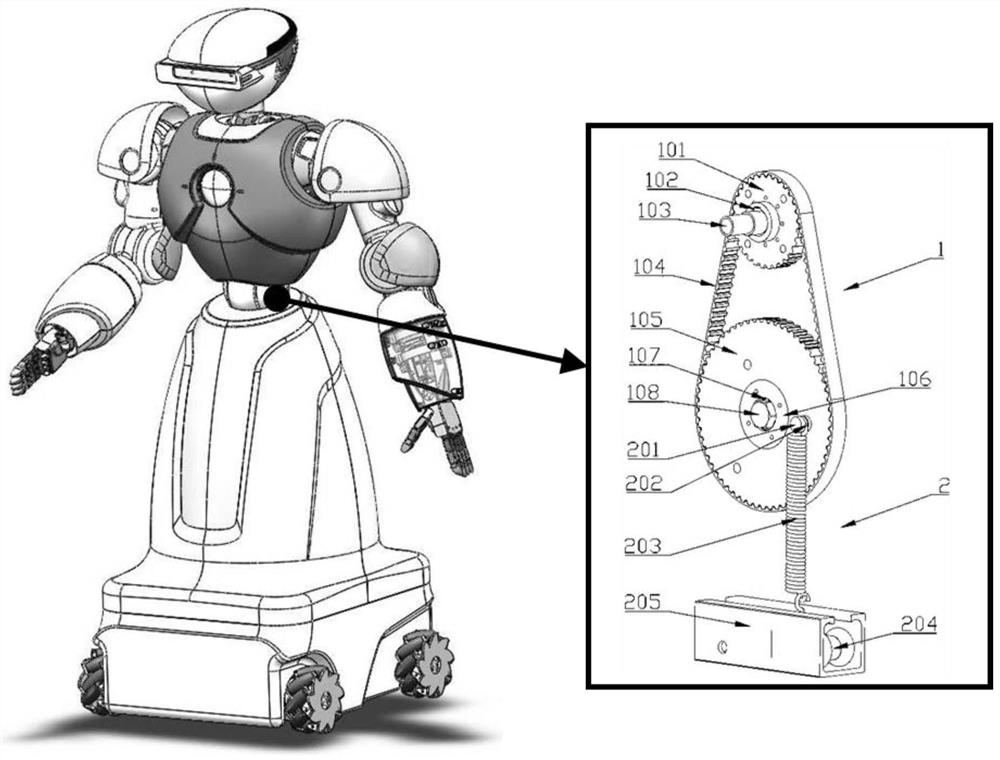
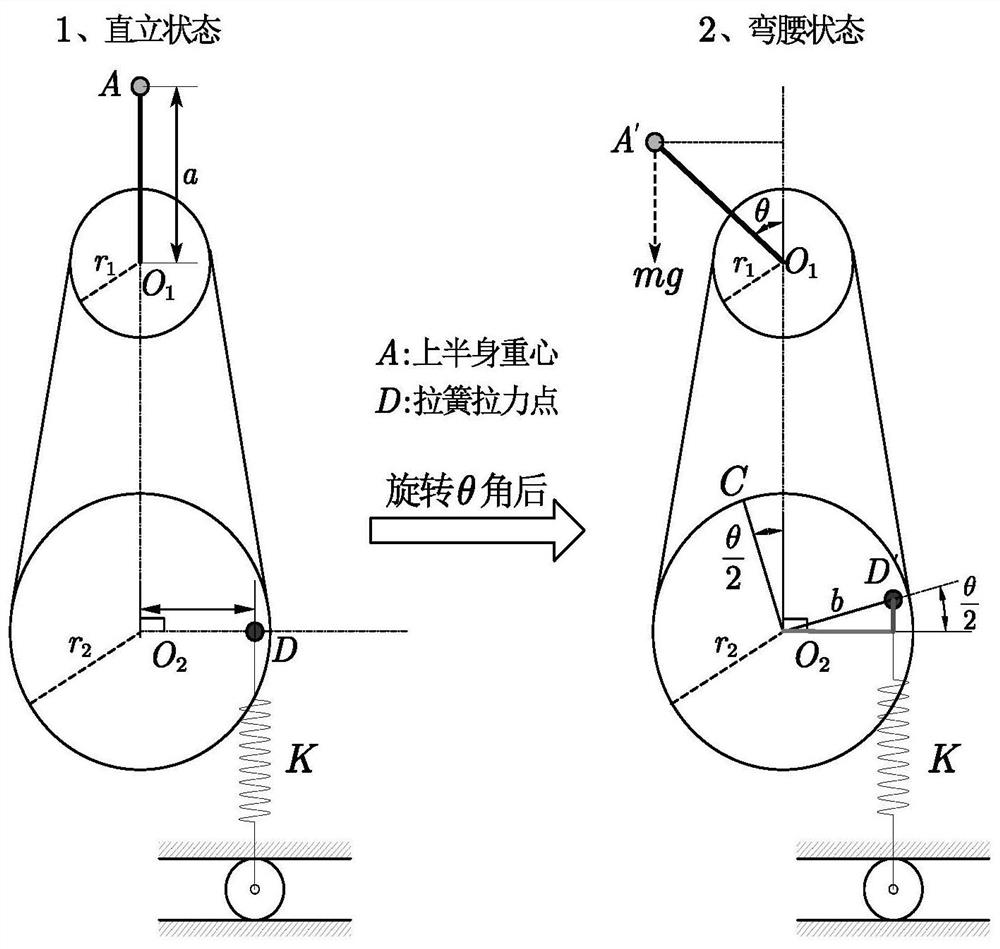
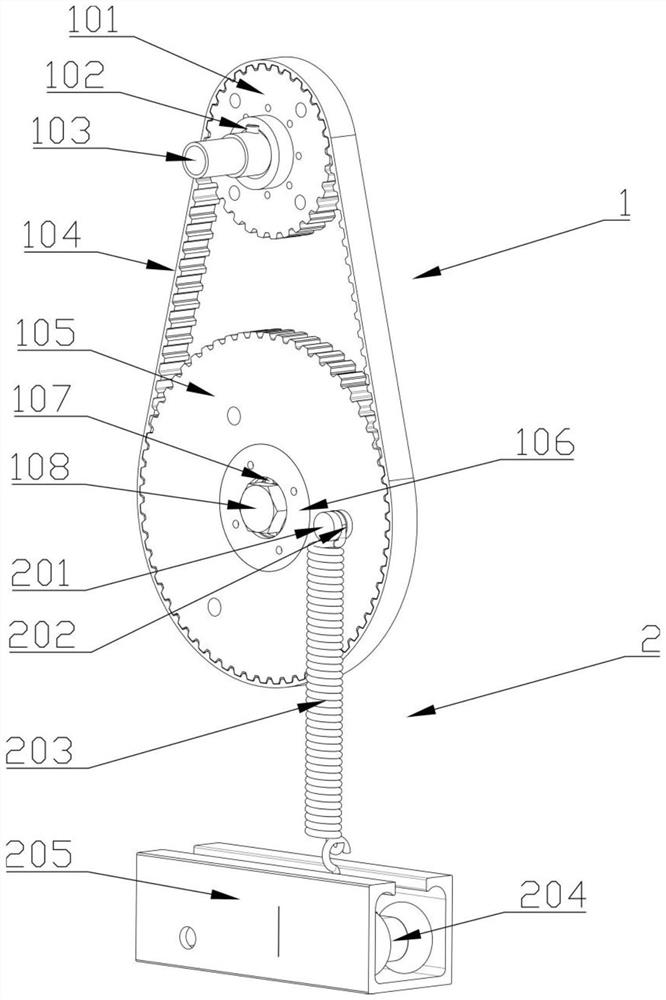
[0026] Such as figure 1 , 3 , 4, a humanoid robot waist joint of the present invention includes: a torque transmission mechanism 1, an extension spring unloading mechanism 2; the torque transmission mechanism 1 is used to transmit the nonlinear time-varying torque generated by the gravity of the upper body during the bending process of the humanoid robot T; the tension spring unloading mechanism 2 is used to balance the nonlinear time-varying torque T.
[0027] Torque transmission mechanism 1 is made up of small pulley 101, common flat key 102, joint shaft 103, synchronous belt 104, large pulley 105, end cover 106, deep groove ball bearing 107 and fixing bolt 108; The mechanism 2 includes: a shoulder screw 201 , a shaft sleeve 202 , a tension spring 203 , a slider 204 , and a guide rail 205 . Shoulder screw 201 is installed in the threaded hol...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More