

Double-mechanical-arm cooperative obstacle avoidance method based on neighborhood traversal
A technology of dual manipulators and manipulators, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., to achieve the effects of easy implementation, improved stability, and excellent motion paths
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] In order to better understand the present invention, the technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
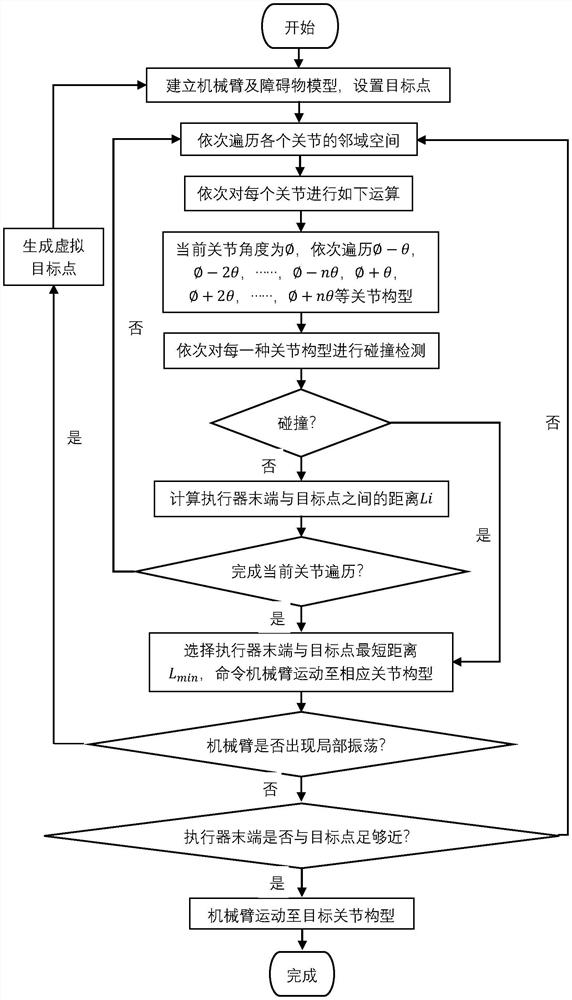
[0051] Such as figure 1 Shown is the specific implementation flowchart of the algorithm of the present invention.
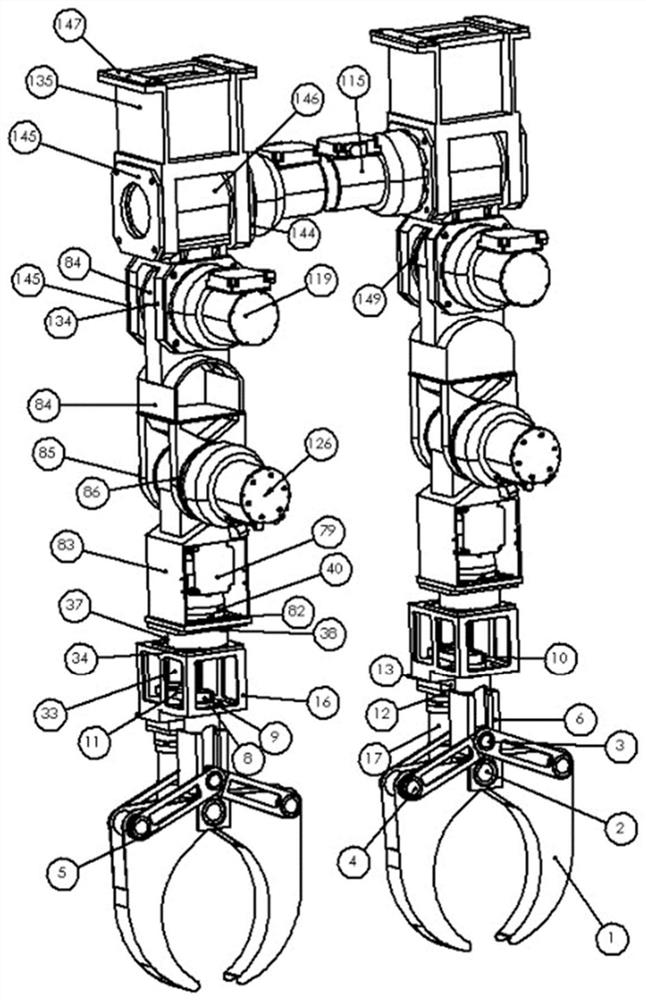
[0052] Such as figure 2 Shown is the physical picture of the dual mechanical arms in the embodiment. The specific parameters of the dual robot arm are shown in the table below.
[0053] Table 1 Dual robotic arm parameters (dual arm spacing 600mm)
[0054]
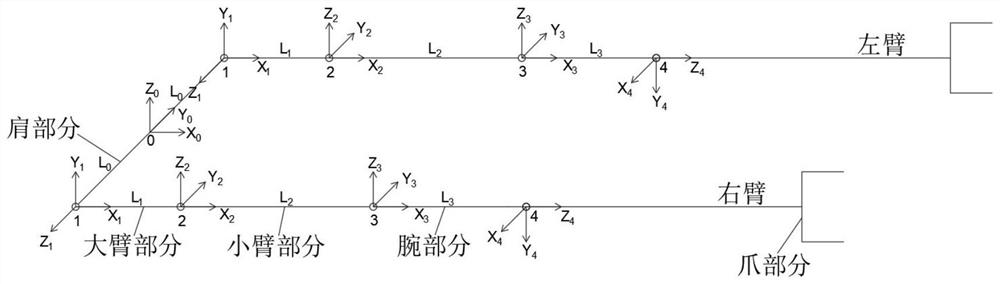
[0055] Such as image 3 As shown, the dual robotic arm can be divided into shoulder joint (shoulder part), upper arm joint (big arm part), forearm joint (small arm part), wrist joint (wrist part), claw joint (claw part) five parts.
[0056] Described shoulder part comprises: shoulder joint motor (115), base (135), backing plate (147), bearing cover (145), transmission shaft 1 (146), motor cover (...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More