

Rotor unmanned aerial vehicle real-time wind speed estimation method based on neural network
A rotor unmanned, neural network technology, applied in neural learning methods, biological neural network models, neural architectures, etc., can solve problems such as system errors, complex relationship between rotor motor speed input equivalent voltage, etc., to achieve accurate estimation, Avoid the determination of thrust and drag coefficients, the effect of accurate wind speed/direction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0020] The method for estimating the real-time wind speed of the rotor UAV based on the neural network of the present invention will be described in detail below in conjunction with the embodiments and the accompanying drawings.
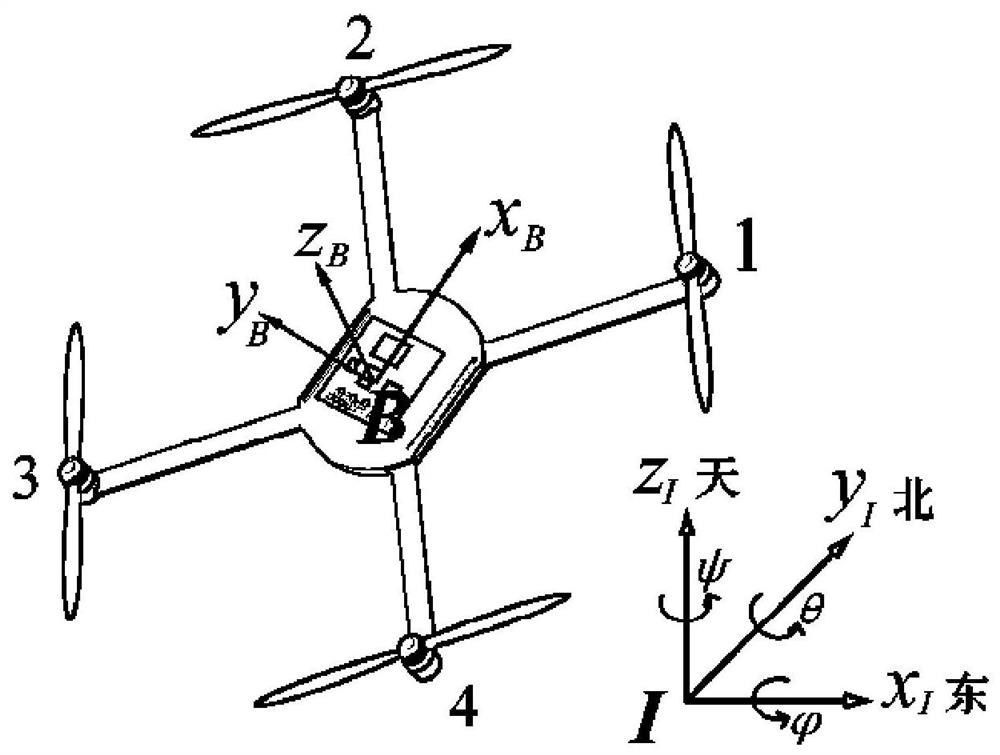
[0021] The real-time wind speed estimation method of rotor UAV based on neural network of the present invention comprises the following steps:
[0022] 1) Carry out the calibration experiment in an open outdoor environment, collect the wind speed of the experimental environment and the flight attitude angle, speed, acceleration of the rotor UAV, and the input equivalent voltage of the rotor motor, and measure the quality of the rotor UAV;
[0023] The anemometer used in the calibration experiment is less than 6m away from the position of the rotor UAV. This is because the wind field is approximately uniform in an open outdoor environment, so the measured value of the anemometer can be used to approximately replace the wind speed at the UAV. In order ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More