

Vehicle nonlinear state fusion estimation method for cloud control intelligent chassis
A nonlinear state and fusion estimation technology, applied in the field of intelligent driving environment perception, which can solve problems such as large estimation error, incomplete measurement of vehicle state information, and filter divergence.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0059] In order to facilitate the understanding of those skilled in the art, the present invention will be further described below in conjunction with the embodiments and accompanying drawings, and the contents mentioned in the embodiments are not intended to limit the present invention.
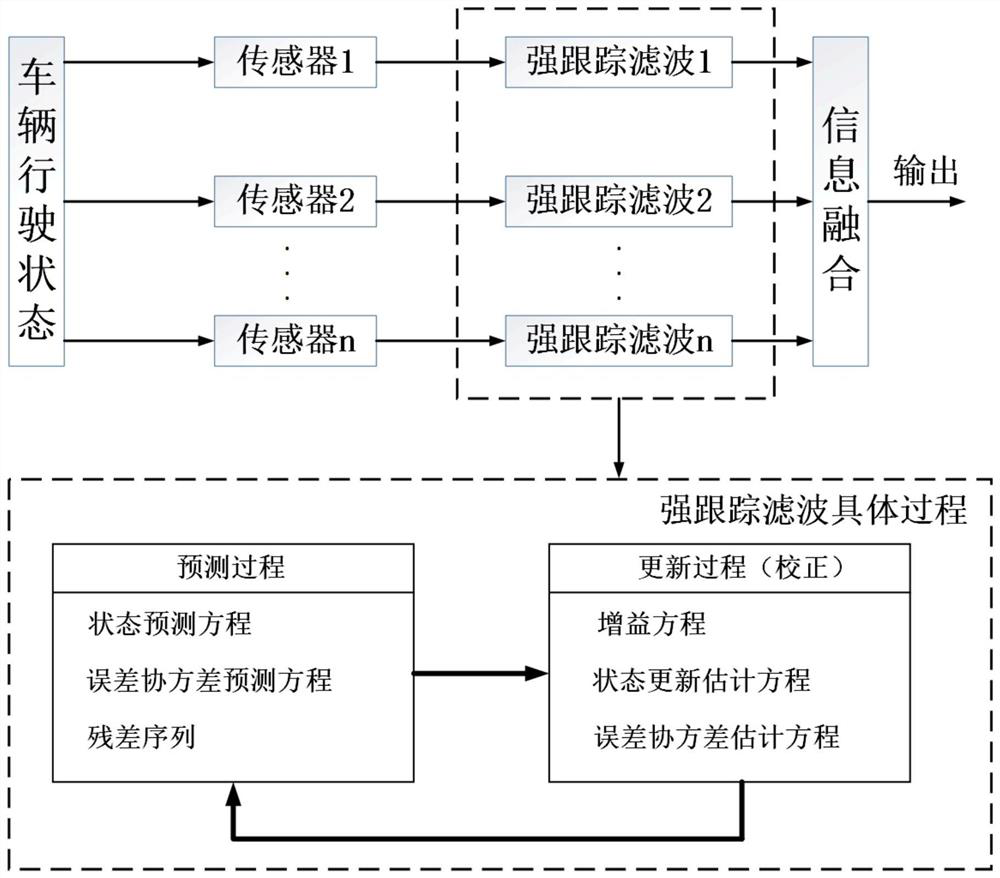
[0060] refer to figure 1 As shown, a kind of vehicle nonlinear state fusion estimation method for cloud-controlled intelligent chassis of the present invention comprises the following steps:
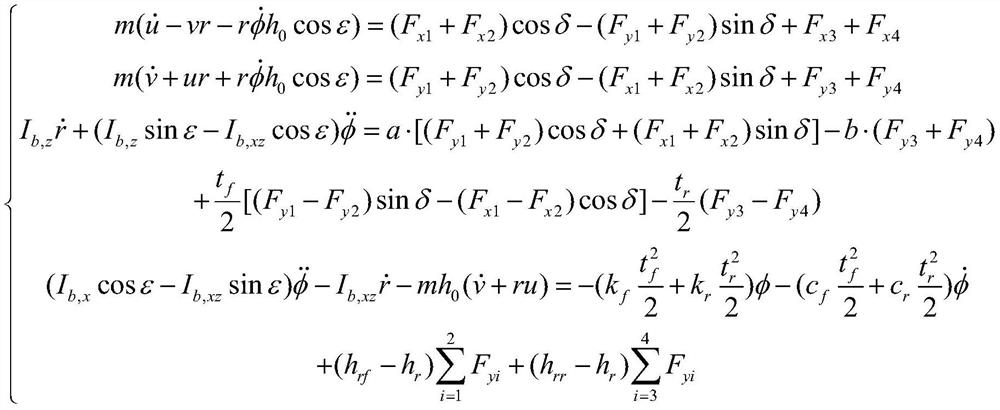
[0061] In order to reflect the nonlinear state of the vehicle more comprehensively, real-time fusion estimates the key states that are necessary and difficult to obtain directly in the cloud-controlled intelligent chassis control. The differential equation of pendulum motion is as follows:
[0062] The force balance equation in the X direction:
[0063]
[0064] Among them, u is the longitudinal velocity, v is the lateral velocity; φ, r are the roll and yaw angular velocity respectively; h 0 is t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More