

Grabbing arm type trash remover robot hydraulic control system
A technology of hydraulic control system and cleaning machine, which is applied in the direction of manipulators, manufacturing tools, and general water supply saving, etc. It can solve the problems of high heat generation and large energy loss of servo pump stations, and achieve the effect of solving large heat generation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The technical solutions of the present invention will be clearly and completely described below in conjunction with the embodiments. Apparently, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
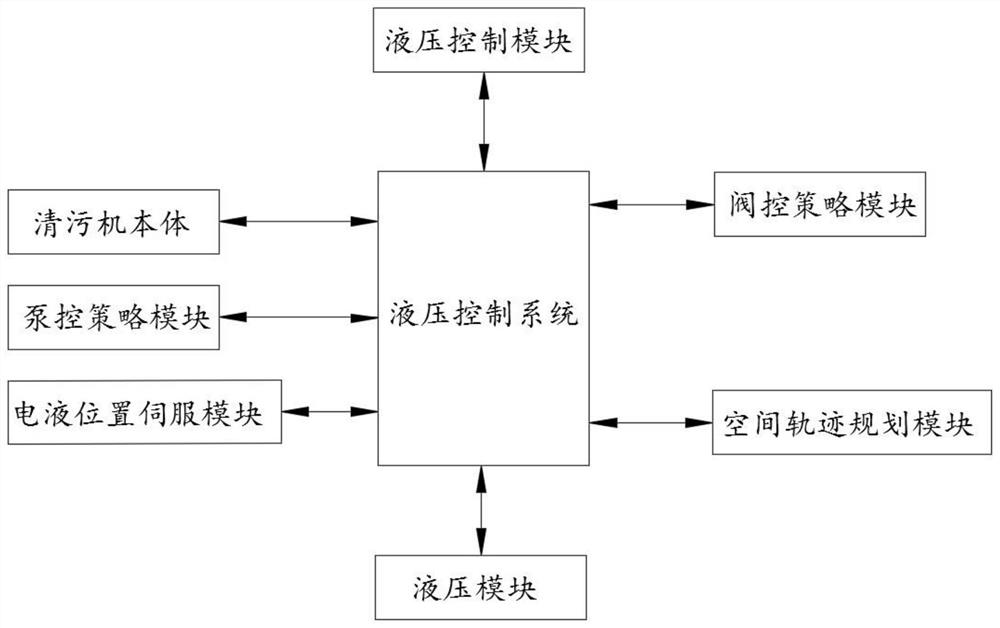
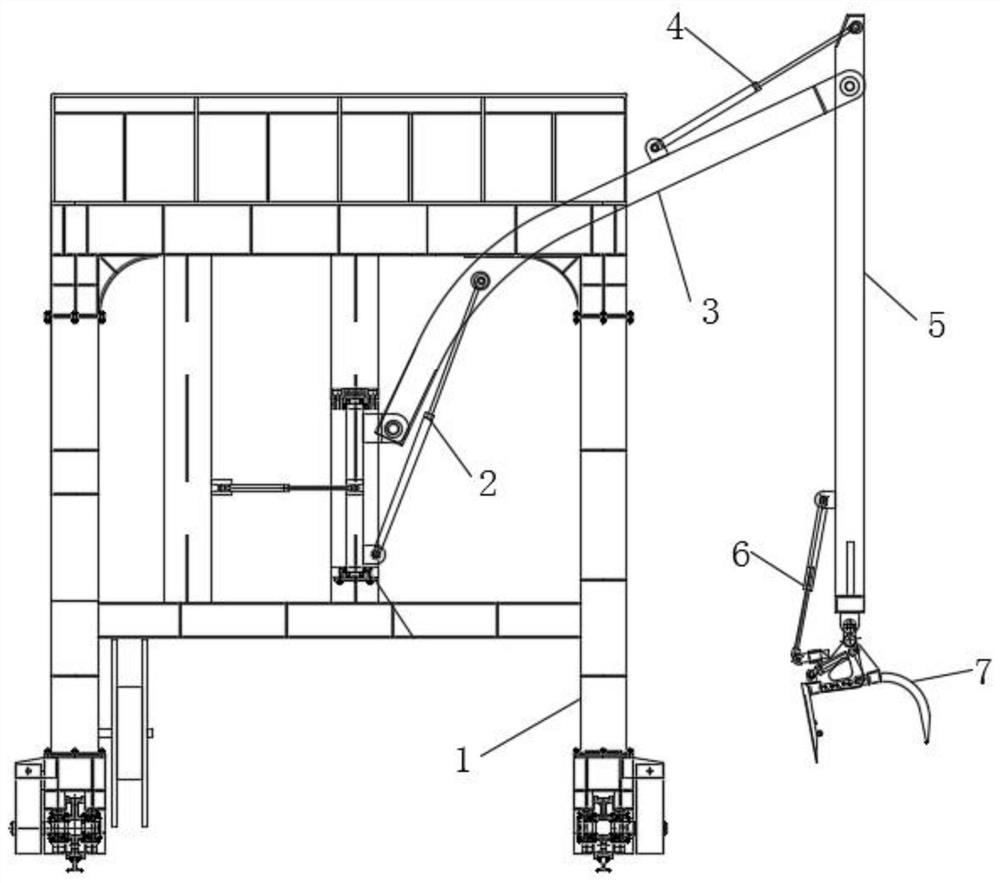
[0043] see figure 1 As shown in the figure, a robot hydraulic control system for a grabbing arm type cleaning machine includes a cleaning machine body, a hydraulic control module, a pump control strategy module, a valve control strategy module, an electro-hydraulic position servo module, a hydraulic module, and a space trajectory planning module;
[0044] The hydraulic control module is used to control the cleaning of the arm-type cleaning machine. The pump control strategy module is used to control the given flow rate of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More