Robot depth camera point cloud downsampling filtering method based on slicing and interpolation
A depth camera and robot technology, applied in the direction of instruments, image acquisition, processor architecture/configuration, etc., can solve the problems of point cloud missing feature points, complex algorithm implementation, large computing resources, etc., to reduce CPU usage and improve system performance , the effect of small data storage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
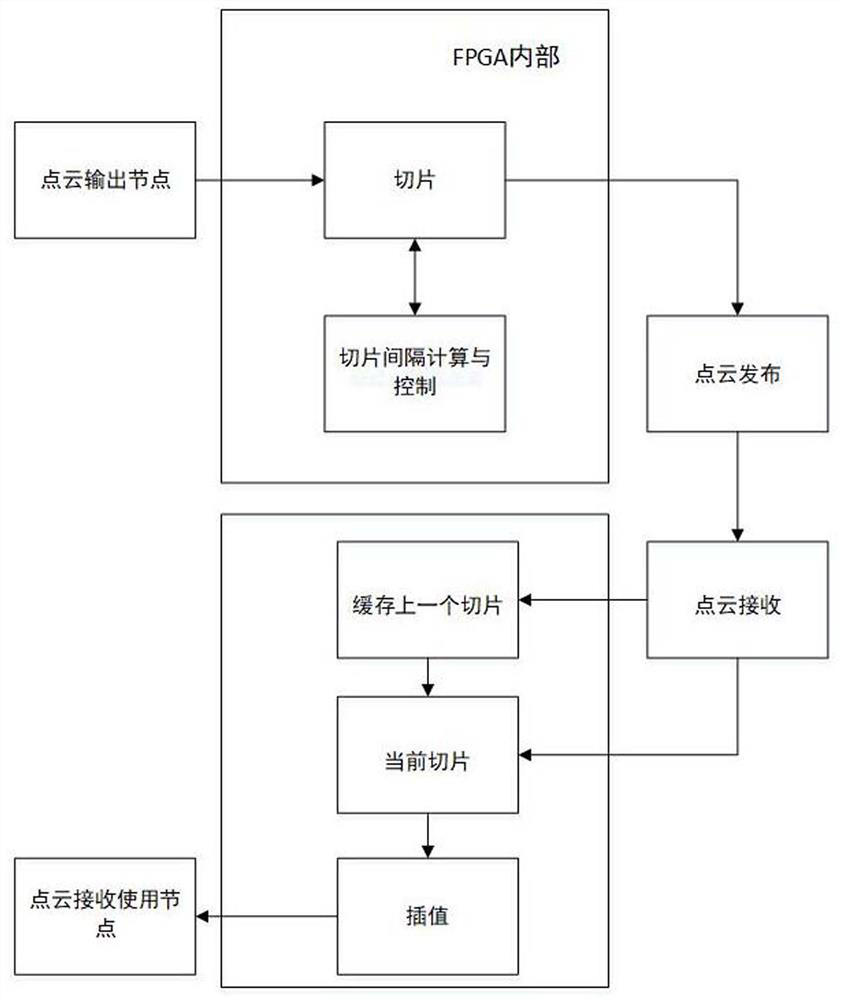
[0032]In step a), the point cloud data collected by the ARM platform at the sending end of the robot is input to the FPGA processor, and the Verilog hardware description language is used in the FPGA processor to perform digital logic involving various functional modules to achieve point cloud downsampling filtering, data transmission, and receiving endpoints Cloud interpolation restore function.
Embodiment 2
[0034]In step a), the FPGA processor at the receiving end of the robot restores the point cloud and sends it to the FPGA processor at the receiving end.
Embodiment 3
[0036]When the FPGA processor performs the slicing of the point cloud data, it uniformly randomly samples the N point cloud machine radius in the slice in the vicinity of the point within r, and finds the number of consecutive point clouds in the neighborhood that exceeds k and the outer contour curvature is greater than q Neighborhood, calculate the number of sub-neighborhoods c, count the total number f of slices where c is less than s, when the total number f is less than t and consecutive e frames appear at the same time, increase the slice span by 1, when the total number When f is greater than u and consecutive e frames appear simultaneously, the slice span is reduced by 1. N is the total number of point clouds in the slice / 1000, r=0.01m, k=5, outer contour curvature=distance of adjacent outer contour point clouds / 0.01, q=0.11, c is a positive integer, f:s=N / 10, f is a positive integer, t=4, e=3, u=6.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com