

Integrated operation system facing limb fracture and control method
A surgical system and limb technology, applied in the field of medical assistance systems, can solve problems such as no practical research results, and achieve the effect of eliminating the influence of uncertain factors, reducing operation time, and reducing restrictions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
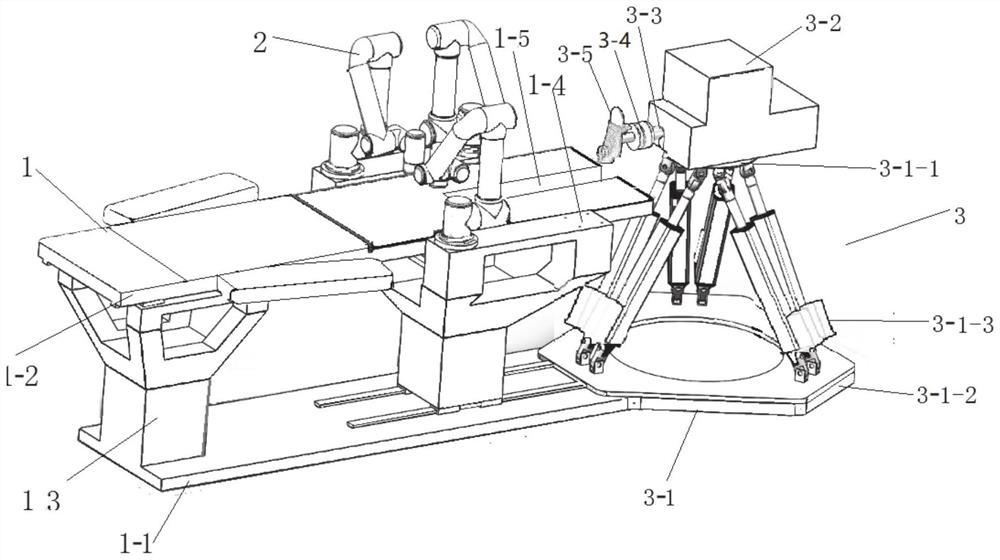
[0057] This embodiment discloses an integrated surgical system for extremity fractures, such as figure 1 As shown, it includes: a robot system, an electric operating bed 1 and a parallel traction device 3 .
[0058] The robot system includes three manipulators 2, a microprocessor, a display and a manipulator control cabinet. The robotic arm is connected to the electric operating bed 1 through a movable base; the robotic arm control cabinet is connected to the robotic arm and the microprocessor respectively, and is used to send control signals to the robotic arm. It has an expansion port that can access external control signals, and The coordinates and posture information of the end of the manipulator are displayed on the display, and the microprocessor has the ability to program online and load external control programs, and send corresponding control instructions to the control cabinet of the manipulator during the reset, steel plate insertion and nail setting stages.
[005...
Embodiment 2
[0137] The purpose of this embodiment is to provide a control method, which is applied to the microprocessor in the first embodiment. During system reset, plate placement and staple placement, it is configured to perform the following steps:
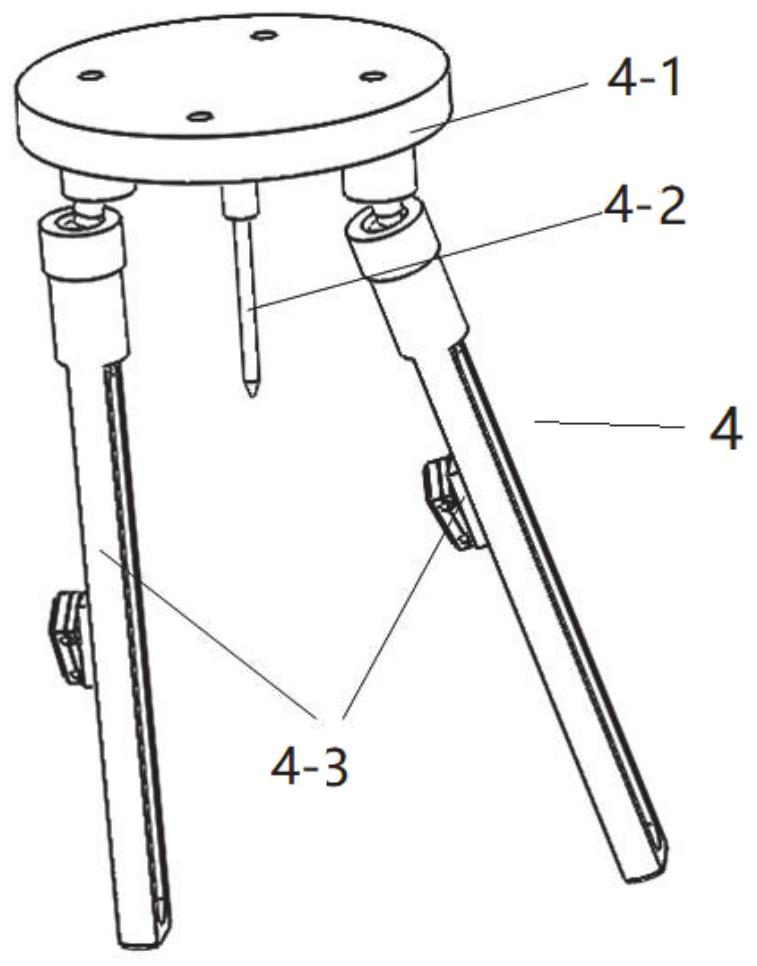
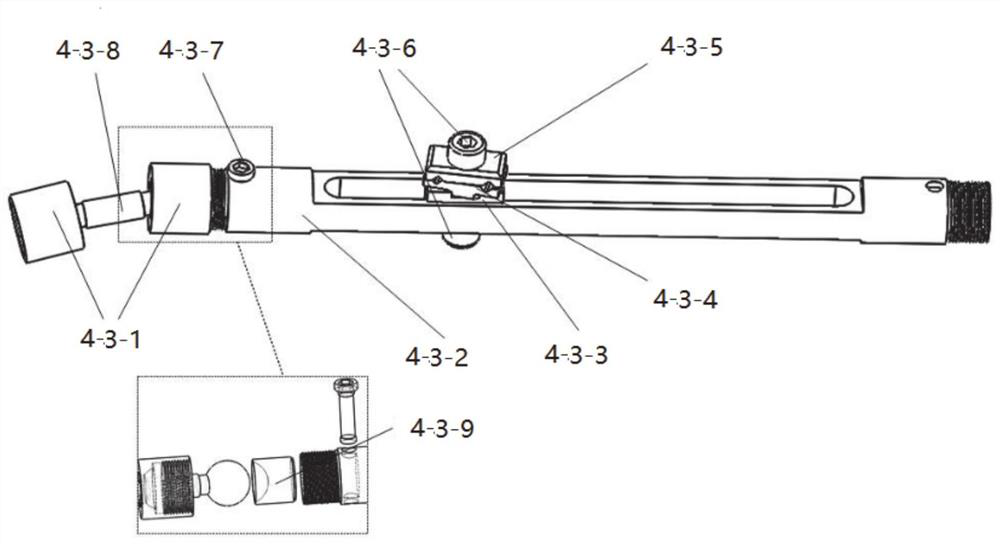
[0138] Preparation steps: install the bone clamping device to the end of the mechanical arm, fix the proximal and distal ends of the broken bone with the external bone fixation device, and install the plate insertion aid to the end of the manipulator, and fix the plate insertion aid to the plate After that, obtain CT images including electric operating table, affected limb, bone external fixation device, and steel plate for three-dimensional modeling;
[0139] Reset control steps:
[0140] (1) After the bone clamping device is installed at the end of the mechanical arm, obtain the coordinates of the needle tip of the calibration needle on the bone clamping device in real time; send control instructions to the mechanical arm to drive the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More