

Multi-mechanical-arm collaborative grinding force compliance control method and system
A compliant control, robotic arm technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as random noise interference, influence tracking effect, large random noise, etc., to eliminate force tracking errors, and is conducive to stable control. , the effect of high operability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
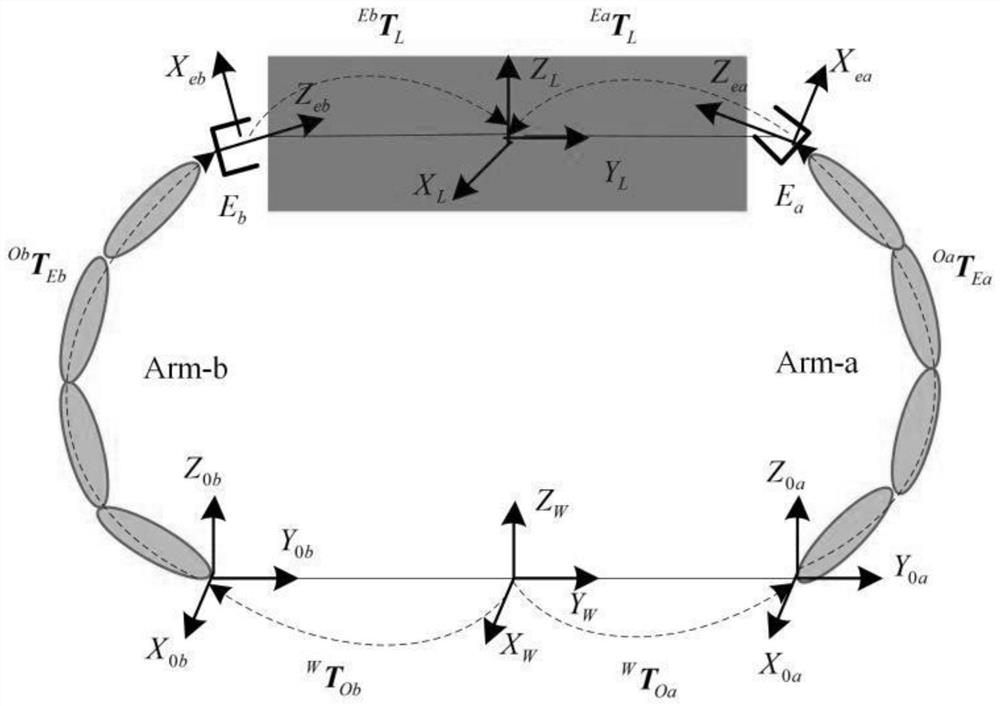
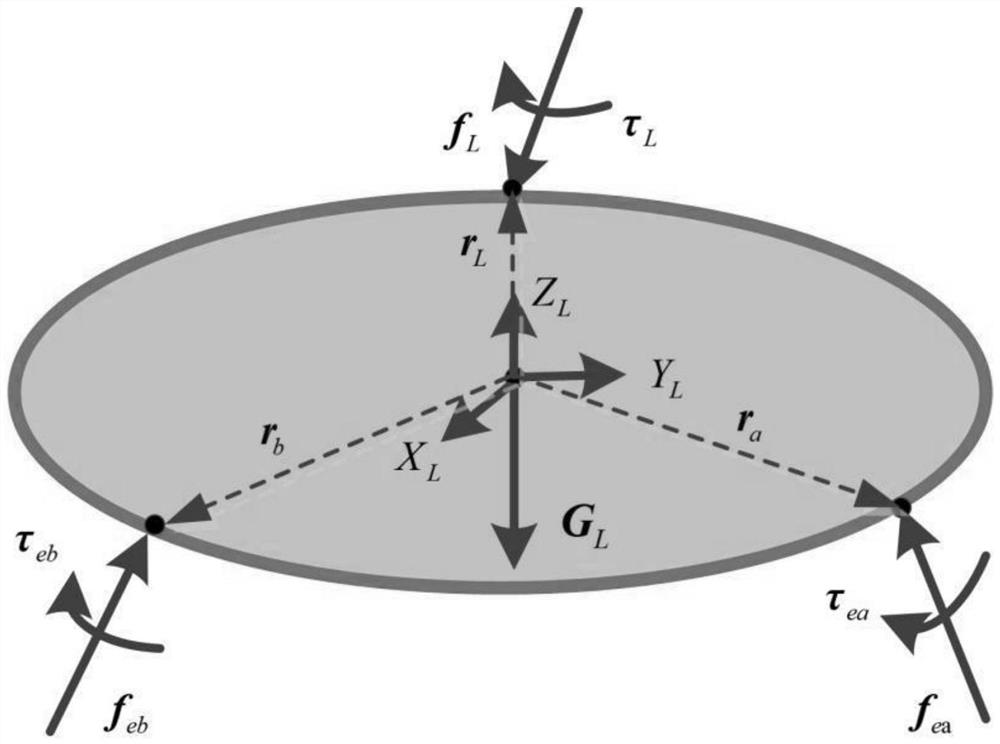
[0061] Such as Figure 1-4 As shown, a multi-arm collaborative grinding force compliance control method uses two grasping robotic arms for cooperative handling, and uses a grinding robotic arm for grinding, which includes the following steps:
[0062] 1) Given the reference position of the target object, the expected internal force (f Id1 , f Id2 ) and expected grinding force;
[0063] Among them, according to the reference position of the target object, its trajectory X is obtained md , select the impedance parameter M of the two grasping manipulator impedance controllers I , B I 、K I , and the upper limit U of the adaptive update rate, the adjustment coefficient β;
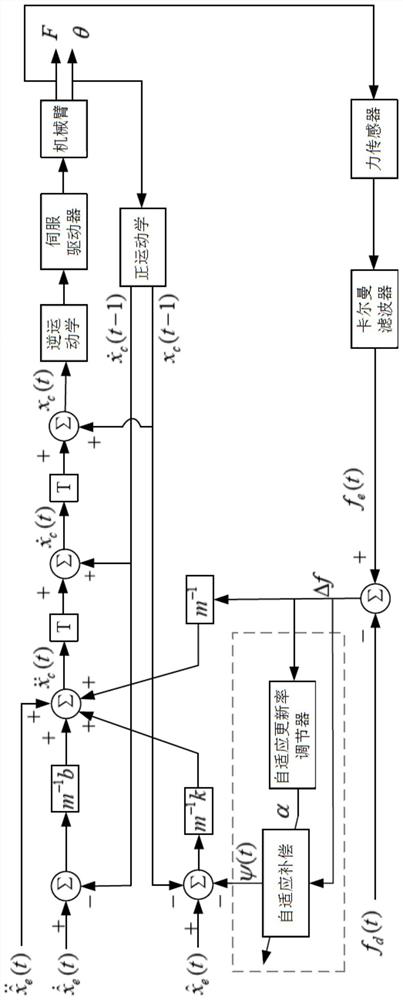
[0064] where a constant grinding force f is set d , select the impedance parameters m, b, k of the impedance controller of the grinding manipulator, and the upper limit value U of the adaptive update rate, and adjust the coefficient β;
[0065] Among them, the process noise Q and observation noise R of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More