

Upper-layer motion state control method for four-hub motor-driven vehicle
A control method and technology of in-wheel motors, which are applied in electric vehicles, control drives, control devices, etc., can solve the influence of steering stability without considering the side slip angle of the center of mass, the lack of joint control of the side slip angle of the center of mass and the yaw rate, tire Model accuracy requirements are too high, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0108] The technical solutions of the present invention will be clearly and completely described below in conjunction with the accompanying drawings. Apparently, the described embodiments are some of the embodiments of the present invention, but not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
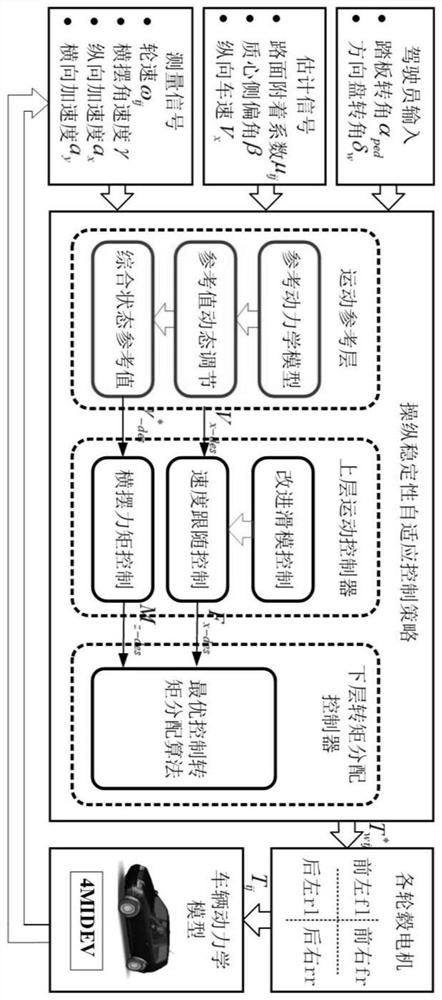
[0109] A method for controlling the motion state of the upper layer of a four-wheel hub motor driven vehicle provided by the present invention, such as figure 1 As shown, it specifically includes the following steps:
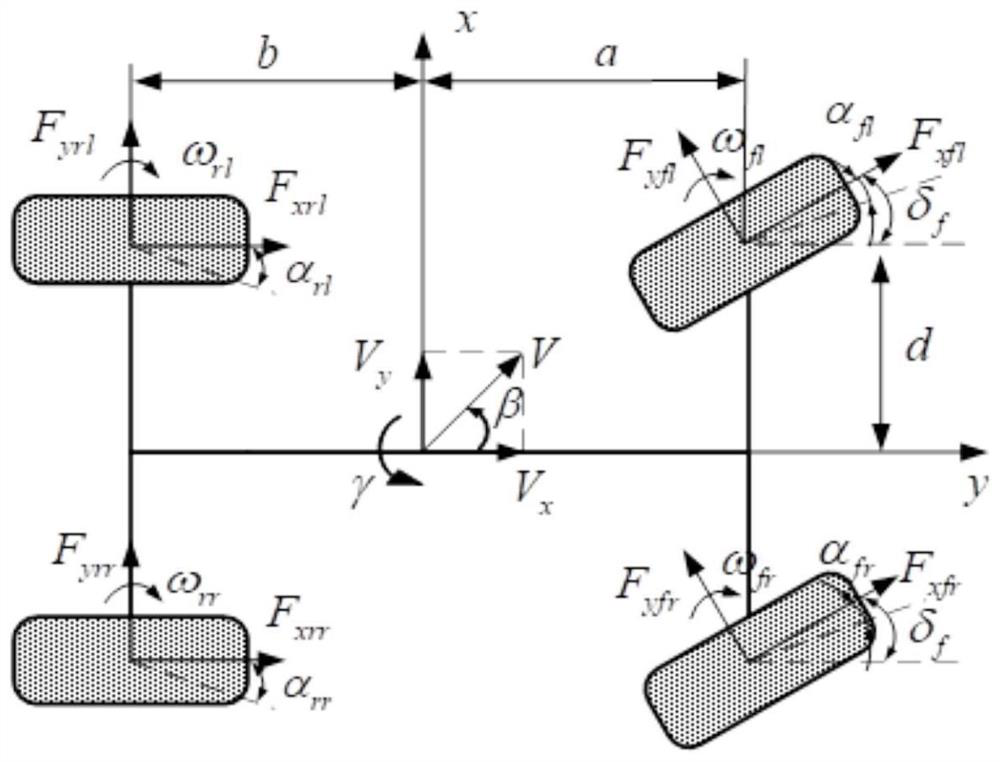
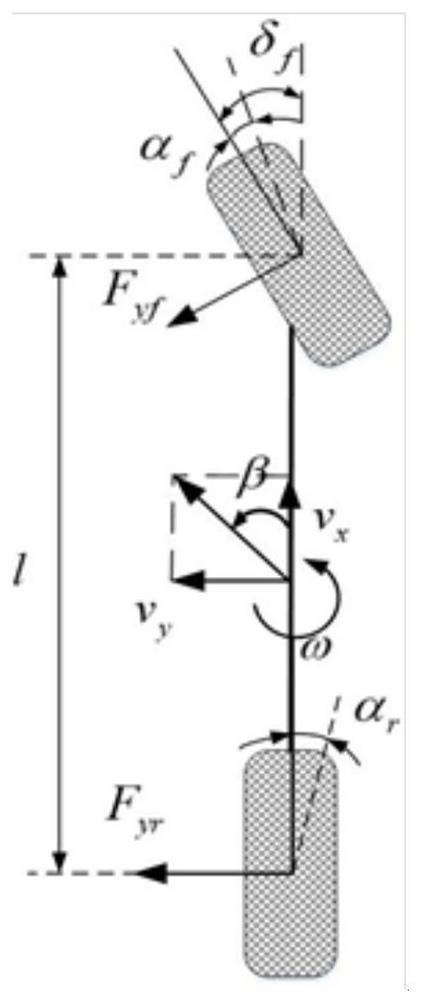
[0110] Step 1. For a vehicle driven by four-wheel hub motors, a seven-degree-of-freedom vehicle dynamics model including longitudinal, lateral, yaw and four wheel rotation degrees of freedom is established; the specific form of the model is as follows figure 2 shown;
[0111] Step 2. Determin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More