

RGB-D visual SLAM method based on dot-line features
A RGB-D, line feature technology, applied in image analysis, image enhancement, instrumentation, etc., can solve problems such as low accuracy, large illumination changes, and low semantics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
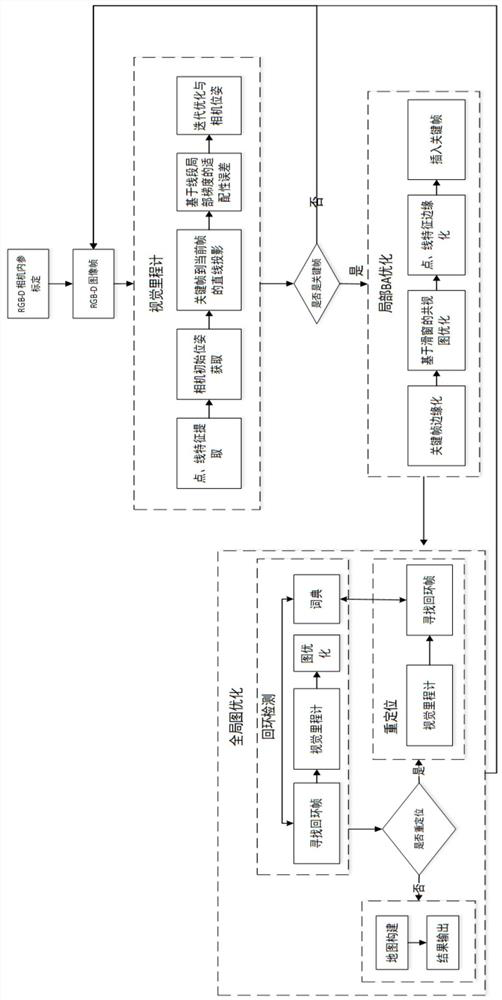
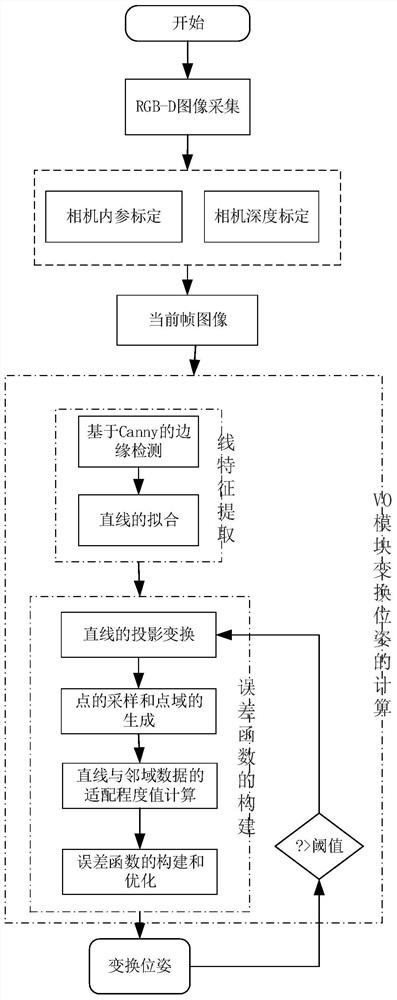
[0087] Such as figure 1and figure 2 As shown, a kind of RGB-D visual SLAM method based on point line feature provided by the present invention comprises the following steps:
[0088] S1. Calibration of internal parameters of RGB-D camera: Use RGB-D camera as the image acquisition device to calibrate the internal parameters of RGB-D camera. The internal parameters of RGB-D camera include the principal point, focal length and distortion coefficient of the camera:
[0089] S11, take the RGB-D camera as the image acquisition device, utilize the RGB-D camera to shoot the fixed-sized calibration plate (checkerboard) under different angles, obtain the image data required for calibration; adopt the RGB-D camera as the image in the present invention Acquisition equipment, RGB-D camera can provide a pair of registered RGB image and depth image in real time, and the depth image can provide accurate depth information for subsequent conversion of pixel coordinates to three-dimensional sp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More