

Multi-robot cloud control system based on cloud side end hybrid computing environment
A multi-robot and hybrid computing technology, applied in the field of robotics, can solve the problems of lack of unified management and scheduling of computing resources, lack of multi-robot collaborative control paradigm, and poor scalability, so as to solve the problems of perception ability interoperability and knowledge sharing, and ensure normal operation. Sequential operation, the effect of improving scalability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be described in further detail below in conjunction with the accompanying drawings.
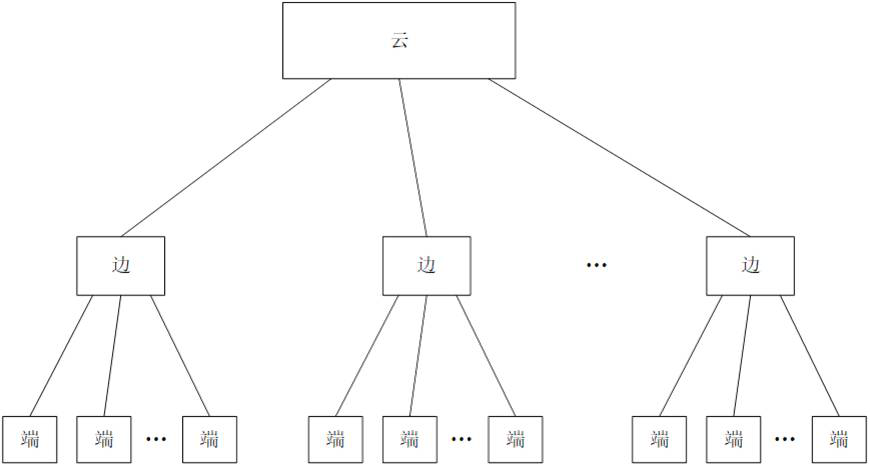
[0040] The computing resources in the intelligent robot cloud control system based on the cloud-edge-end hybrid computing environment provided by the present invention are divided into cloud, edge, and end three-level platforms according to the geographical location and network environment, such as figure 2 As shown, the end, as the bottom platform, represents the computing resources equipped with the robots used to perform jobs and the sensing devices used to collect sensing data in actual job scenarios; the cloud is composed of large-scale computing and storage clusters, parallel computing and The distributed storage capability is the strongest, but the physical location is far away from the actual operation scene, and the network communication delay and cost are high; the edge is between the end and the cloud, and consists of hardware resources such as hig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More