

High-precision point cloud map construction method
A map construction, high-precision technology, applied to navigation through speed/acceleration measurement, satellite radio beacon positioning system, measurement device, etc., can solve the problems of reduced efficiency, unfriendly data accumulation, low degree of automation, etc., to meet the requirements of High-precision requirements, overcoming difficult handling, and improving quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
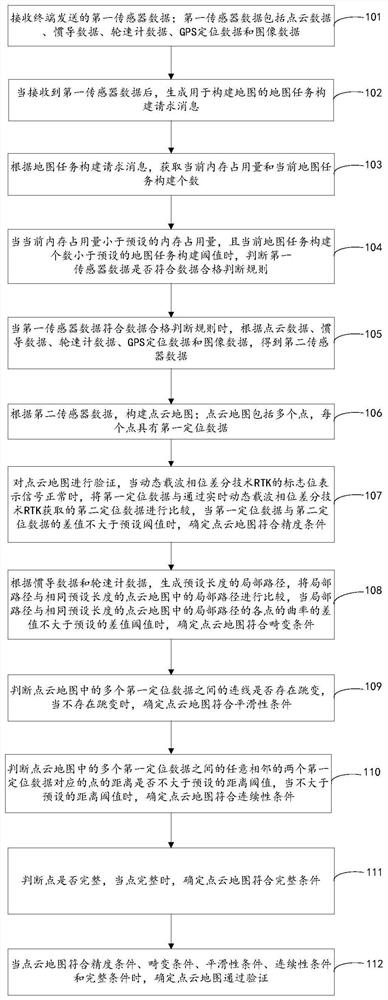
Image

Examples
Embodiment Construction
[0045] The technical solutions of the present invention will be described in further detail below with reference to the accompanying drawings and embodiments.
[0046] The method for constructing a high-precision point cloud map provided by Embodiment 1 of the present invention is applied to a cloud server for constructing a high-precision point cloud map.
[0047] It should be noted that the sensor data required to construct a high-precision point cloud map is collected by a smart vehicle, where a smart vehicle can be understood as an unmanned self-driving vehicle. Smart vehicles are equipped with a variety of sensors. The source of point cloud map data is based on sensors. Various sensors include but are not limited to cameras, lidar, Global Positioning System (Global Positioning System, GPS), inertial measurement unit (Inertial measurement unit, IMU) and wheel speedometer. Among them, there can be multiple cameras and laser radars, which are respectively arranged around th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More