

Vehicle-mounted mechanical arm type fruit picking and boxing system and method based on machine vision
A technology of machine vision and robotic arm, applied in manipulators, packaging fruits/vegetables, program control manipulators, etc., can solve problems such as internal fruit damage, fruit quality reduction, manual operation fatigue, etc., to improve quality and efficiency, and reduce labor costs , the effect of flexible fruit picking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solution of the present invention more clearly, but not to limit the protection scope of the present invention.
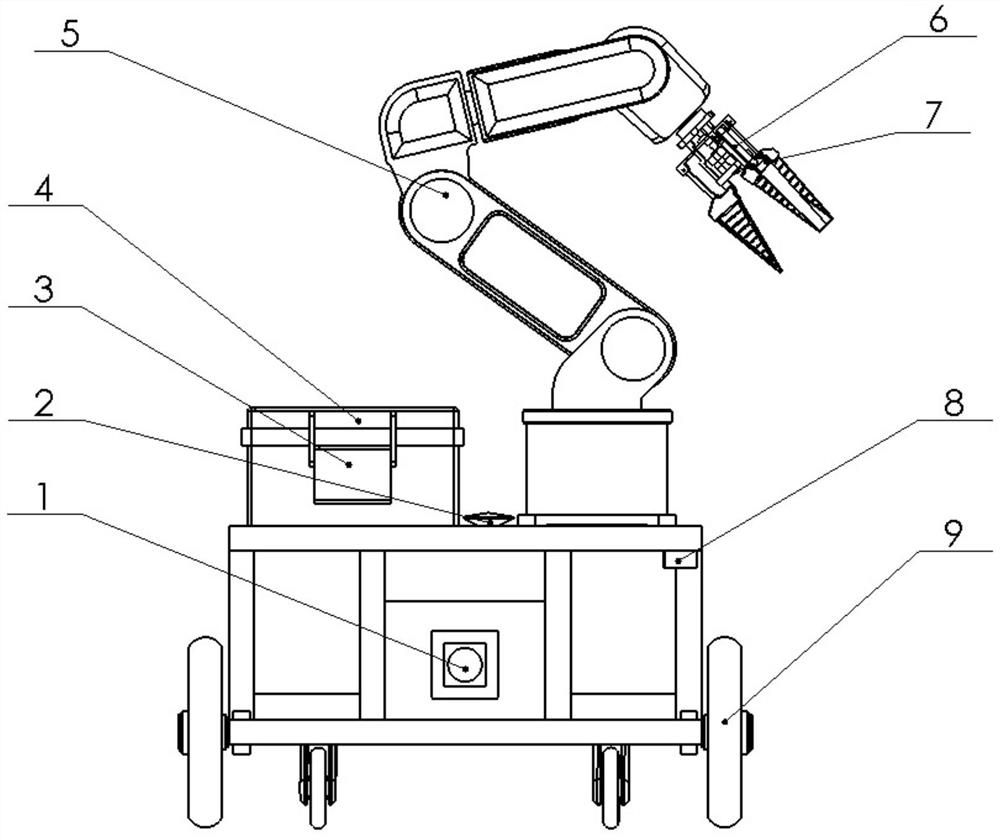
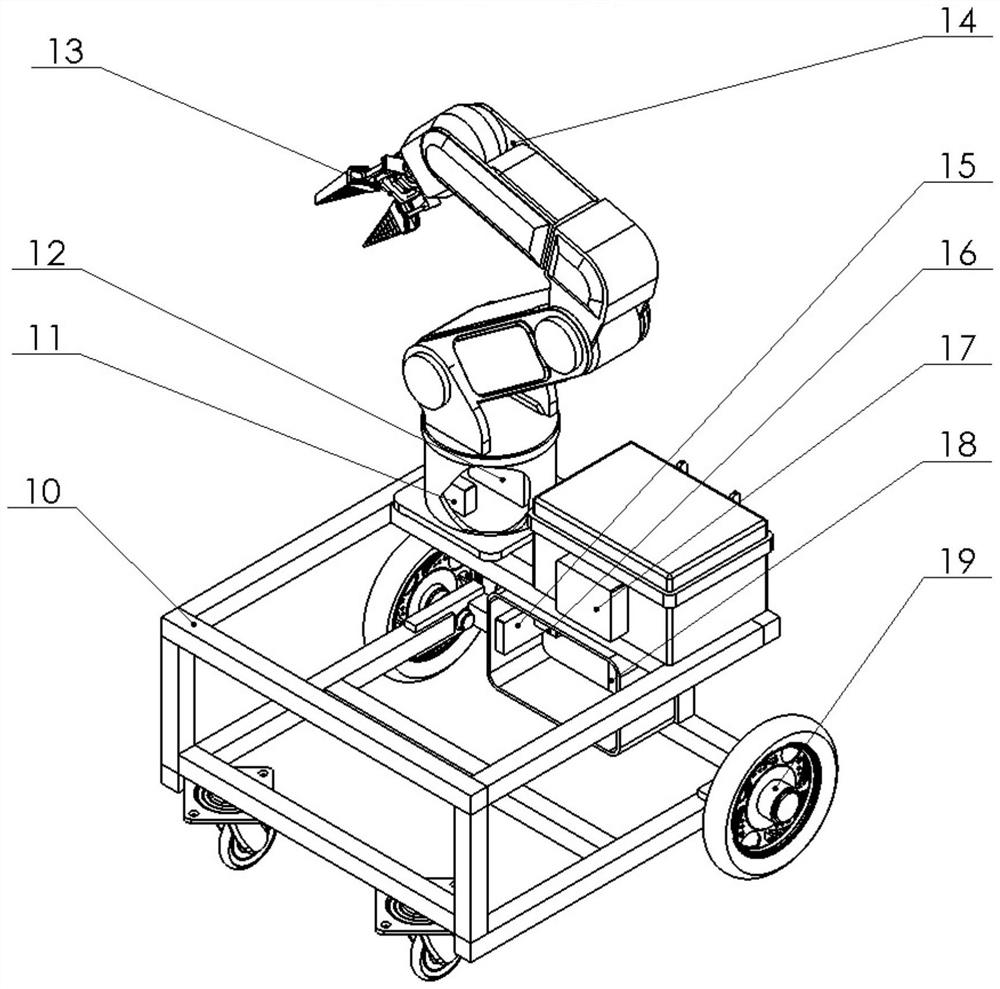
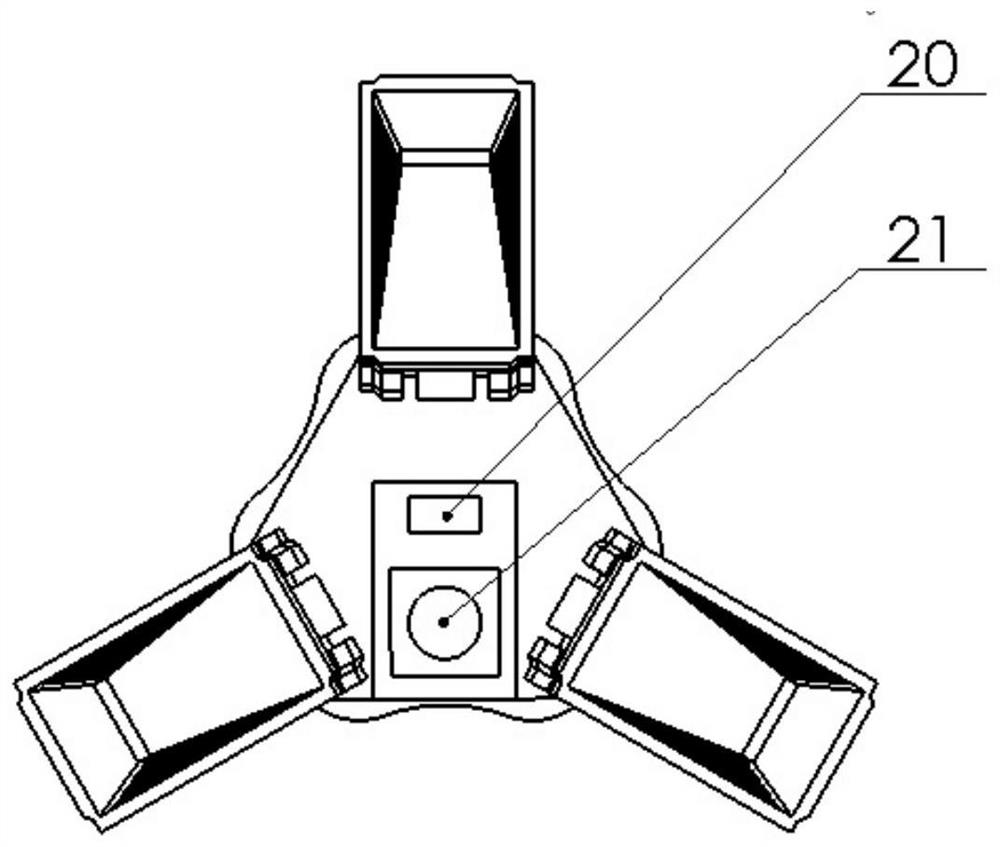
[0033] Such as figure 1 , 2 As shown in , 3, the present invention proposes a vehicle-mounted mechanical arm type fruit picking and packing system based on machine vision, including: a self-propelled vehicle device, which is used to carry a robotic arm device and related equipment, and can drive the entire vehicle-mounted mechanical arm based on machine vision at the same time fruit picking and boxing system to move; the robotic arm device is installed on the self-propelled vehicle device for picking and packing fruit; the machine vision device is installed on the end effector 13 of the robotic arm device for identification and positioning Fruit; the control system, installed in the self-prope...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More