Puncture robot control method based on real-time ultrasound image
A technology of ultrasonic image and control method, which is applied in the direction of surgical robots, puncture needles, surgical manipulators, etc., can solve the problems of low puncture accuracy, reduce the error of puncture target points, improve the success rate of surgery, and reduce the surgical burden.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0014] DETAILED DESCRIPTION OF THE PREFERRED EMBODIMENTS The specific steps of the puncture robot control method based on real-time ultrasound images of this embodiment are as follows:
[0015] Step 1. Obtain the motion direction and displacement of the puncture target in the ultrasonic plane and outside the ultrasonic plane respectively;
[0016] Step 2: Use the model predictive control method to control the end of the puncture robot to perform corresponding operations according to the movement directions and displacements of the puncture target in the ultrasound plane and outside the ultrasound plane.
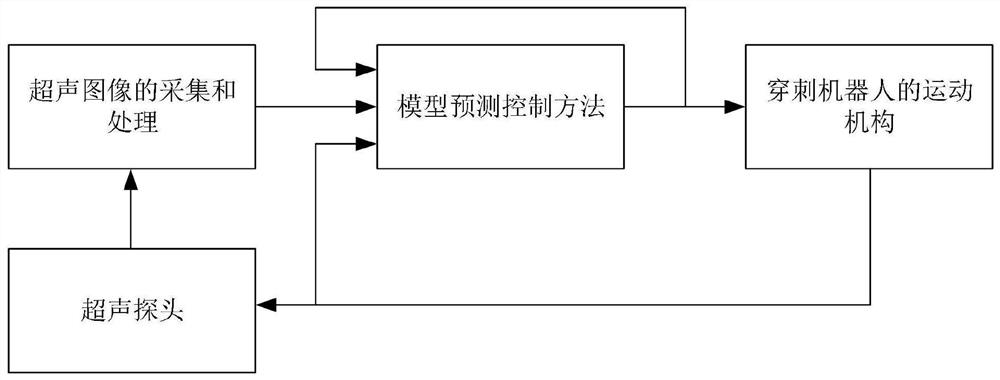
[0017] Specifically, as figure 1 As shown, the method of the present invention collects an ultrasonic image through the ultrasonic probe clamped at the end of the puncture robot, and mainly includes three parts. First, in step 1, the characteristics of the puncture target are extracted by the brightness and geometric information in the ultrasonic image. The spatial position ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com