

Action assisting device based on brain plasticity and control method and circuit thereof
A technology of an action assisting device and a control method, which is applied in the field of human-computer interaction and can solve the problems that mechanical information cannot directly reflect the user's motion intention, misleading judgment of motion intention, and low recognition accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0088] The present invention will be further described in conjunction with the accompanying drawings, but not as a limitation of the present invention.
[0089] It should be noted that all the drawings of the present invention are in simplified form and use inaccurate scales, and are only used to facilitate and clearly assist the purpose of illustrating the embodiments of the present invention.
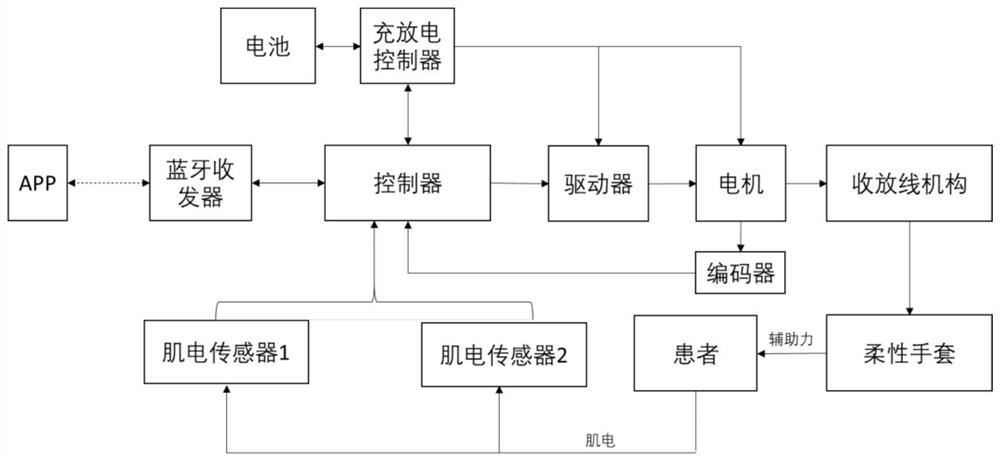
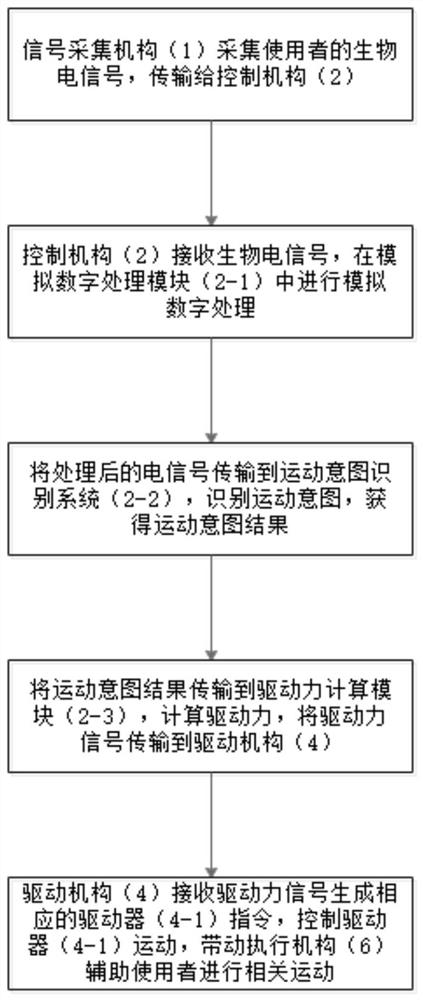
[0090] see figure 1 , image 3 , Figure 5 , the present invention has designed a motion assisting device based on brain plasticity and a control method thereof, specifically as follows: a signal acquisition mechanism 1, which is used to collect and transmit the user's surface electromyography signal, including a signal sensor 1-2, a signal transmission line 1-1 .
[0091] In a specific embodiment, the signal sensor 1-2 uses electrode sheets, and three electrode sheets are designed, wherein the No. 1 electrode sheet and the No. 3 electrode sheet collect the user's surface electromy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More