

Heart fixator gas circuit control method based on ARM embedded platform
An embedded and fixer technology, applied in the direction of program control, computer control, general control system, etc., can solve the problems of large motion inertia and low degree of freedom of rigid body robots, achieve strong anti-interference ability, solve real-time monitoring of blood parameters, small size effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The objects and functions of the present invention and methods for achieving the objects and functions will be clarified by referring to the exemplary embodiments. However, the present invention is not limited to the exemplary embodiments disclosed below; it can be implemented in various forms. The essence of the description is only to help those skilled in the relevant art comprehensively understand the specific details of the present invention.
[0032] Hereinafter, embodiments of the present invention will be described with reference to the accompanying drawings. In the drawings, the same reference numerals represent the same or similar components, or the same or similar steps.
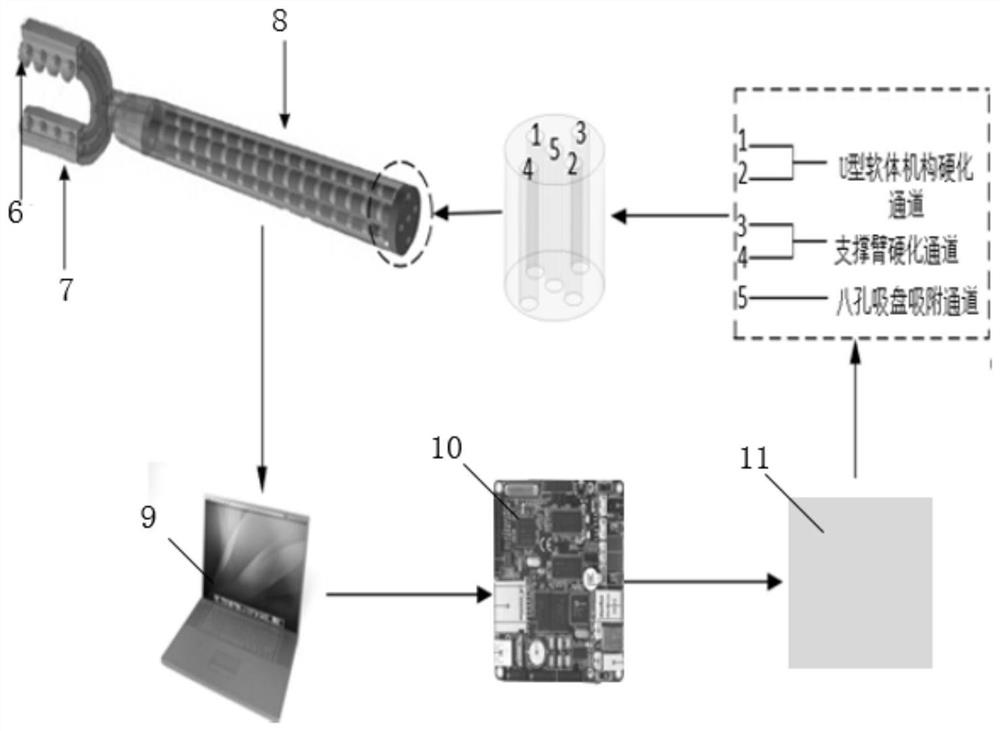
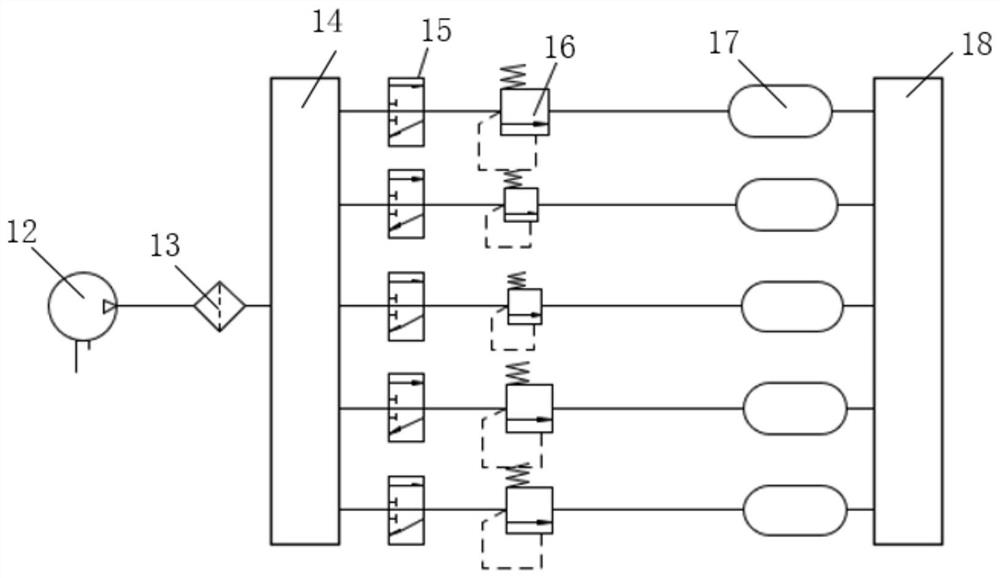
[0033] In order to realize the adsorption of the U-shaped eight-hole suction cup 6 of the heart holder 18 and the hardening of the U-shaped soft structure 7 and the flexible support arm 8, a control device and its control method based on the air circuit system of the heart holder realize th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More