Multi-agent controller and safety radius separation design method under communication uncertainty
A safety radius, multi-agent technology, applied in the general control system, adaptive control, comprehensive factory control, etc., to achieve the effect of avoiding conflicts
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064]The present invention provides a multi-intelligent body controller and a safety radius separation design method under unclean communication. A obstacle is evaded in an environment in an uncertainty in the communication network as an example, and the specific embodiment will be further described. The simulation and calculation process is performed on the MATLAB R2019B under the WIN7 Ultimate operating system on a computer, memory 16.0GB.
[0065]Such asFigure 7 As shown, the specific steps achieved by the present invention are as follows:
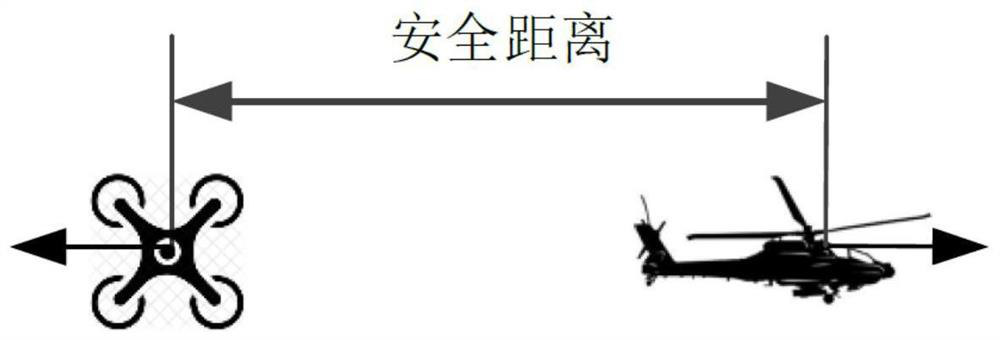
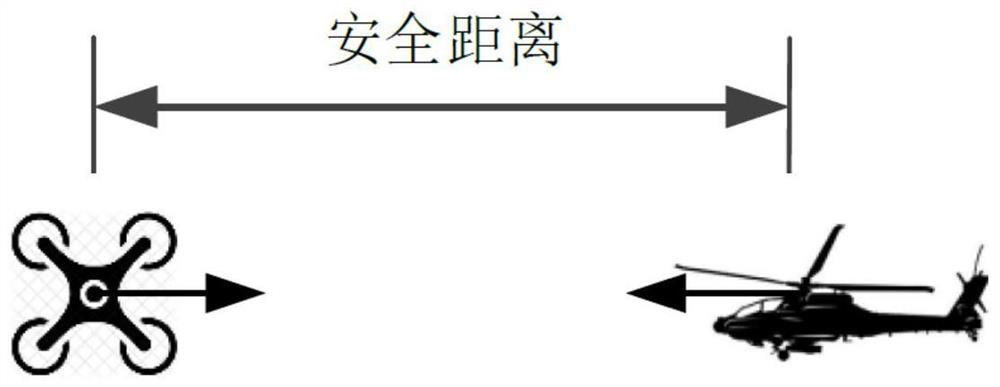
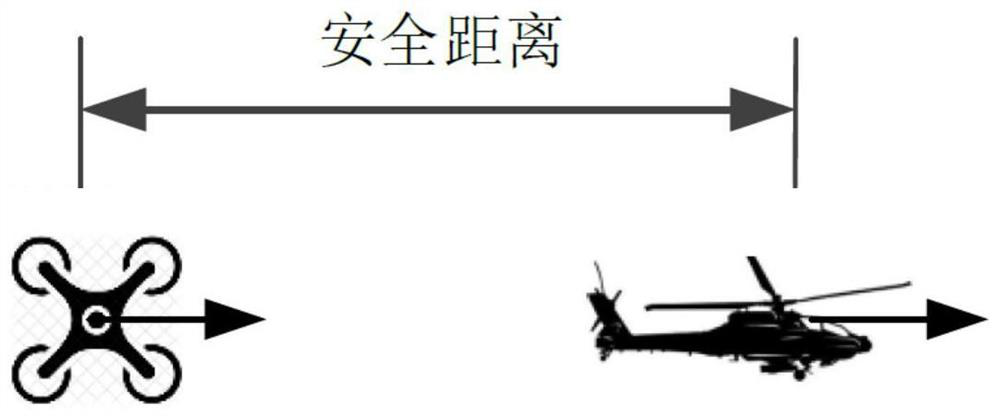
[0066]Step 1: Establish motion model, communication network model and safety radius model for intelligent body
[0067]First, set the relevant parameters of the intelligent body, obstacle and communication network environment. According to the actual situation, the number of intelligent body is set; the number of obstacles n; the maximum speed of the intelligent body is the maximum speed V.mThe maximum speed V of the obstacleo; Physical radius r of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More