SLAM method based on RGB-D image
A RGB-D, image technology, applied in the direction of instruments, biological neural network models, character and pattern recognition, etc., can solve the problems of serious time-consuming, large matching range, unreasonable accuracy and real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
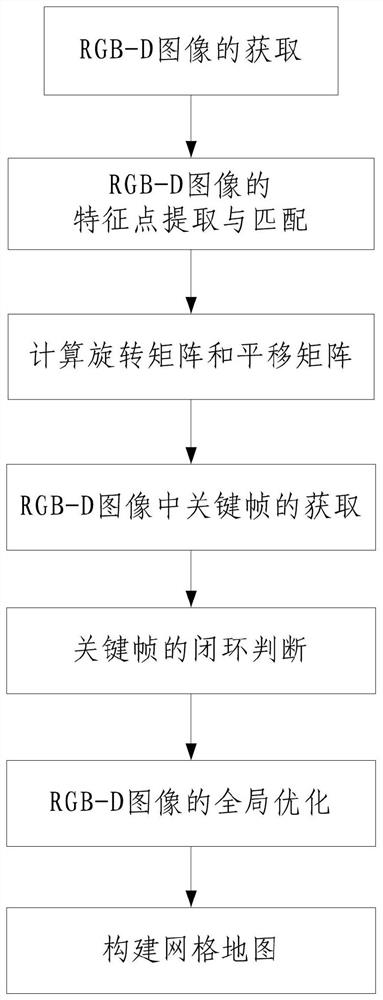
[0090] Such as figure 1 Shown a kind of SLAM method based on RGB-D image, this method comprises the following steps:
[0091] Step 1. Acquisition of RGB-D images:
[0092] Use the depth camera to collect the space to be shot in real time according to the preset collection time, and send the RGB-D images collected at each sampling time to the computer; where the RGB-D image collected at the i-th sampling time includes the first The i-frame color image and the depth value corresponding to the i-th frame color image, i is a positive integer, and 1≤i≤M, M represents the total number of frames of the color image;
[0093] Step 2, feature point extraction and matching of RGB-D image:
[0094] Step 201, the computer adopts the ORB algorithm to extract the feature points of the i-th color image to obtain the feature point description subset of the i-th color image; wherein, the feature point descriptor corresponding to the a-th feature point in the i-th color image Denote as the at...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More