

Underwater robot intelligent system for large-water-area fish resource investigation, and working method thereof
A technology of underwater robots and intelligent systems, applied in water resources assessment, underwater operation equipment, underwater ships, etc., can solve problems such as data errors, cost and lack of accuracy, achieve low destructiveness, improve survey accuracy, high efficiency effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] In order to make the purpose, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
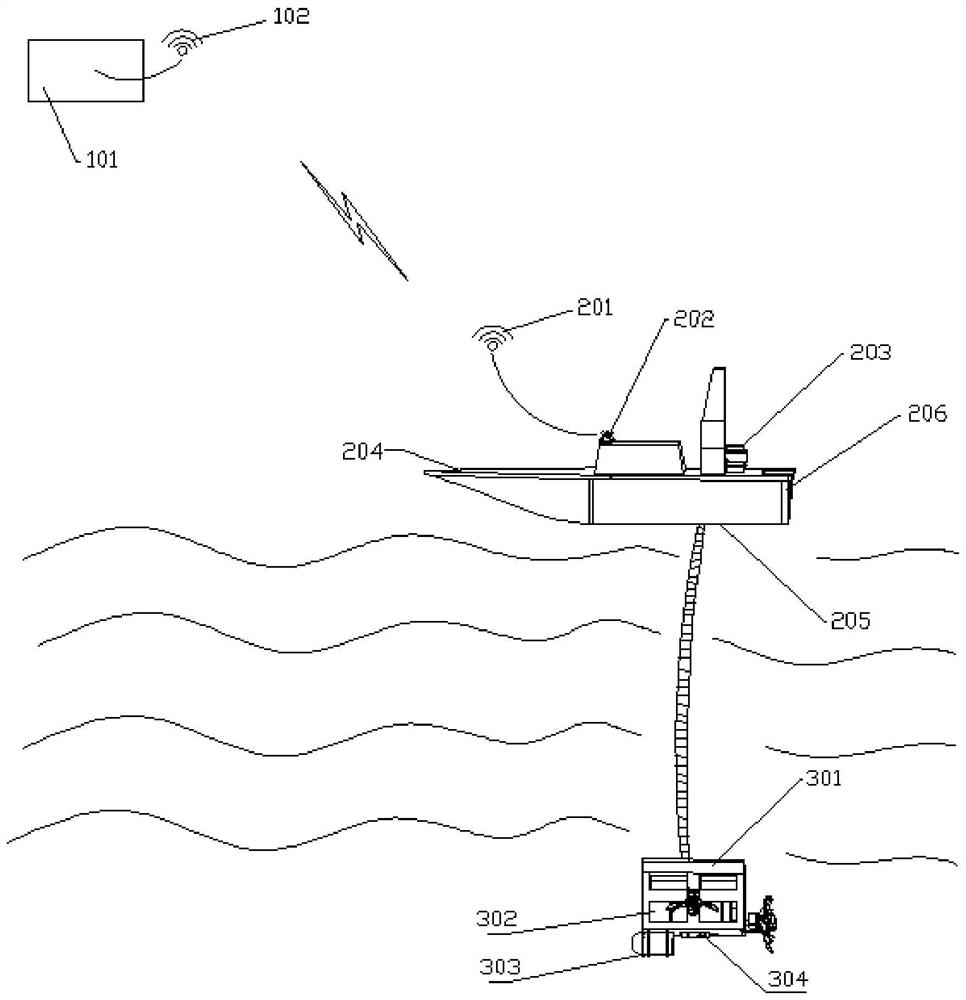
[0027] Such as figure 1 As shown, the present invention is made up of shore-based console and underwater intelligent investigation system.
[0028] The shore-based console is placed on land, and includes a shore-based server 101 and a shore-based wireless communication module 102 . The shore-based server 101 mainly completes the classification processing of the image information returned by the unmanned ship and the recording of depth and position information; The communication module communicates in real time.
[0029] The underwater intelligent investigation system includes an unmanned ship 206 and an unmanned submersible vehicle; the unmanned ship 206 is equipped with a sonar 203, a Beidou navigation system 202, a ship-borne wireless commu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More