

Mixed type traditional Chinese medicine automatic precision grabbing device
A grabbing device and hybrid technology, which is applied in the direction of transportation and packaging, conveyor objects, conveyors, etc., can solve the problems of complicated grabbing process, lowered grabbing accuracy, and falling of traditional Chinese medicine, and achieves strong structural wrapping, The effect of precise control of the gripping volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and through specific implementation methods.
[0051] Wherein, the accompanying drawings are only for illustrative purposes, showing only schematic diagrams, rather than physical drawings, and should not be construed as limitations on this patent; in order to better illustrate the embodiments of the present invention, some parts of the accompanying drawings will be omitted, Enlarged or reduced, does not represent actual product size.
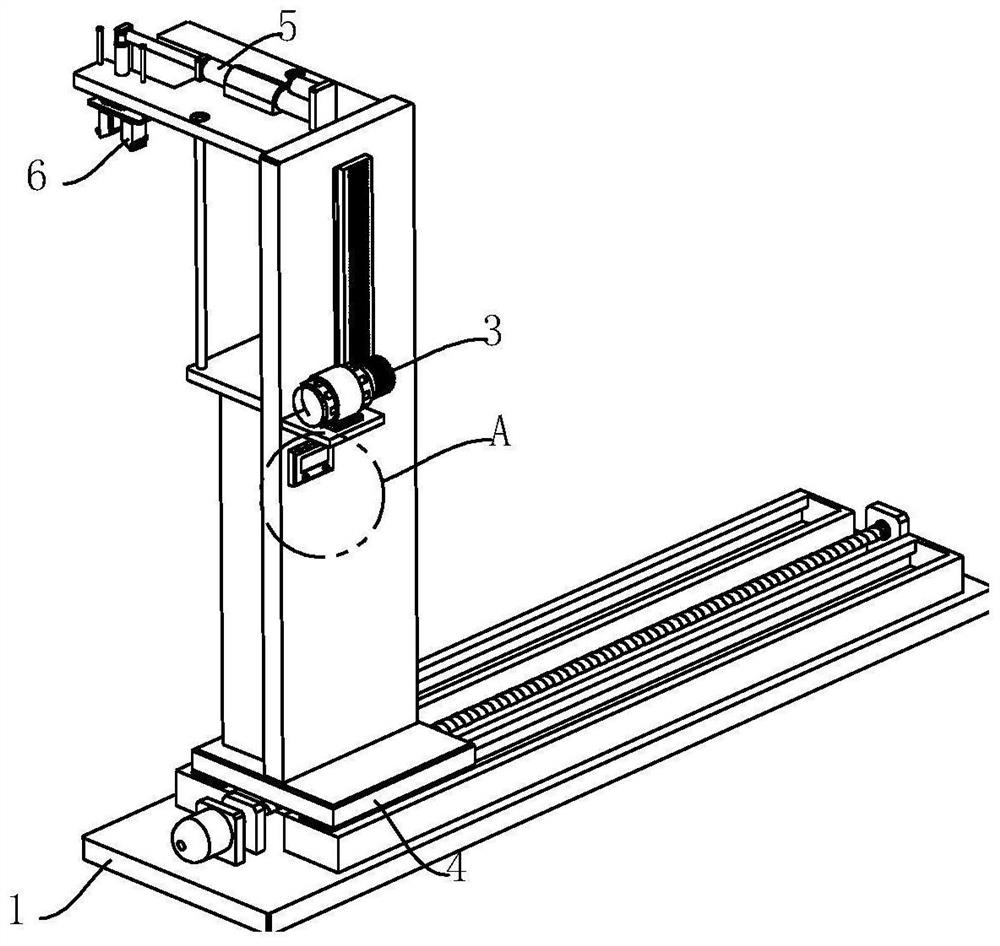
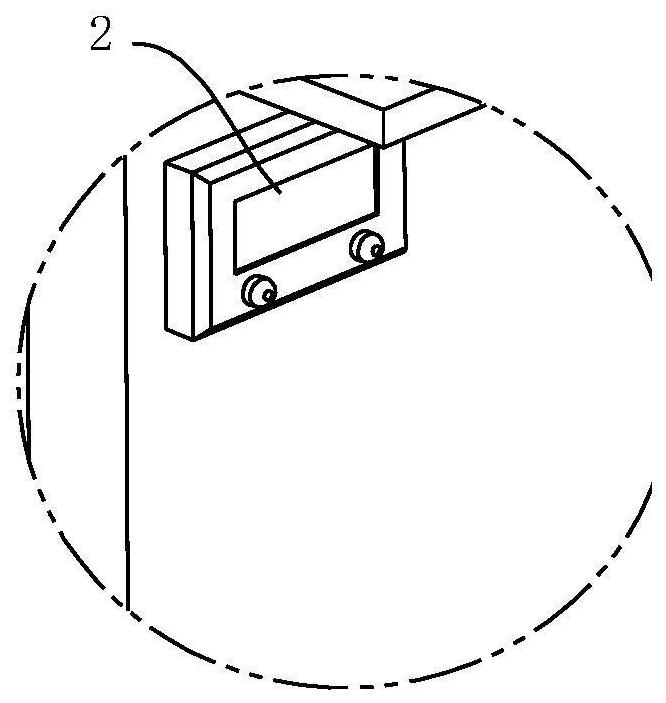
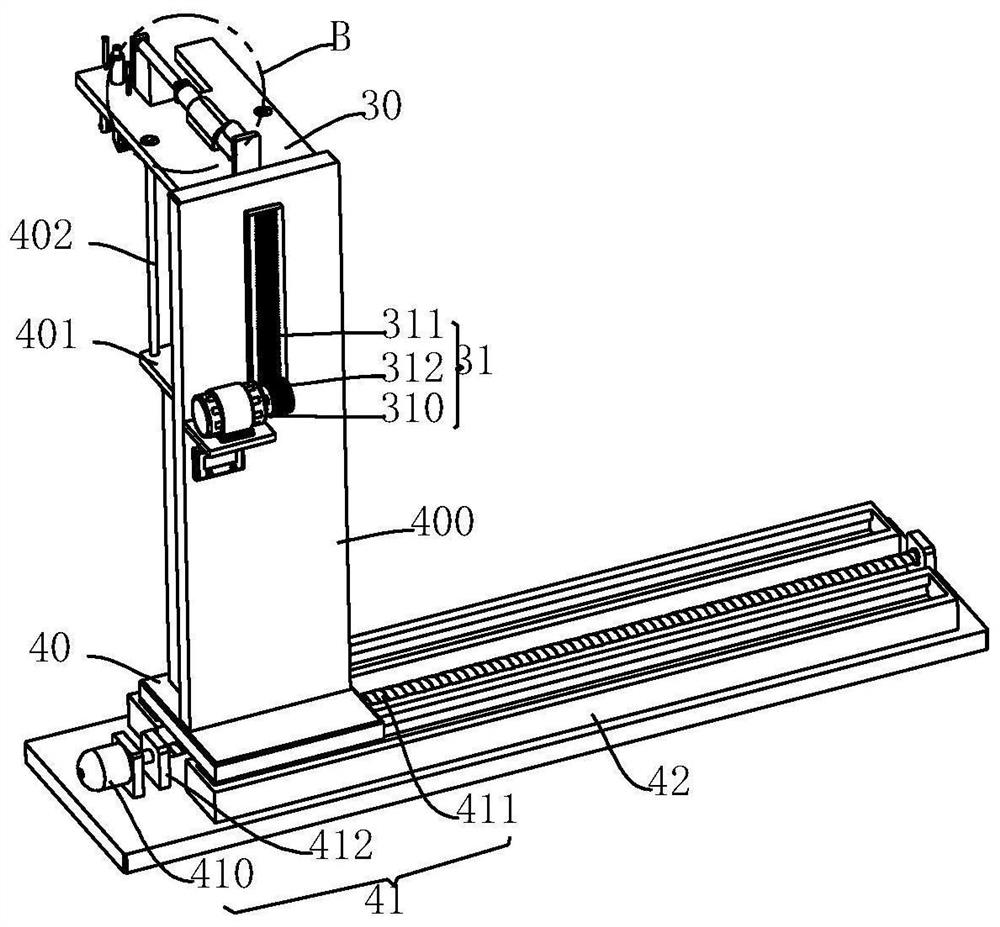
[0052] refer to Figure 1 to Figure 11 The shown hybrid automatic precision grasping device for traditional Chinese medicine includes a base 1, and also includes a controller 2, a lifting mechanism 3, a sliding mechanism 4, a hooking mechanism 5 and a grasping mechanism 6, and the sliding mechanism 4 is located at The top of the base 1 slides to support the grasping mechanism 6. The sliding mechanism 4 includes a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More