

Unmanned aerial vehicle assisted intelligent vehicle driving method and system based on indoor positioning
An indoor positioning and driving system technology, applied to radio wave measurement systems, positioning, motor vehicles, etc., can solve the problems of image positioning, sensing range and flexibility limitations, and lack of practicability, so as to improve positioning accuracy, The effect of improving reliability and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
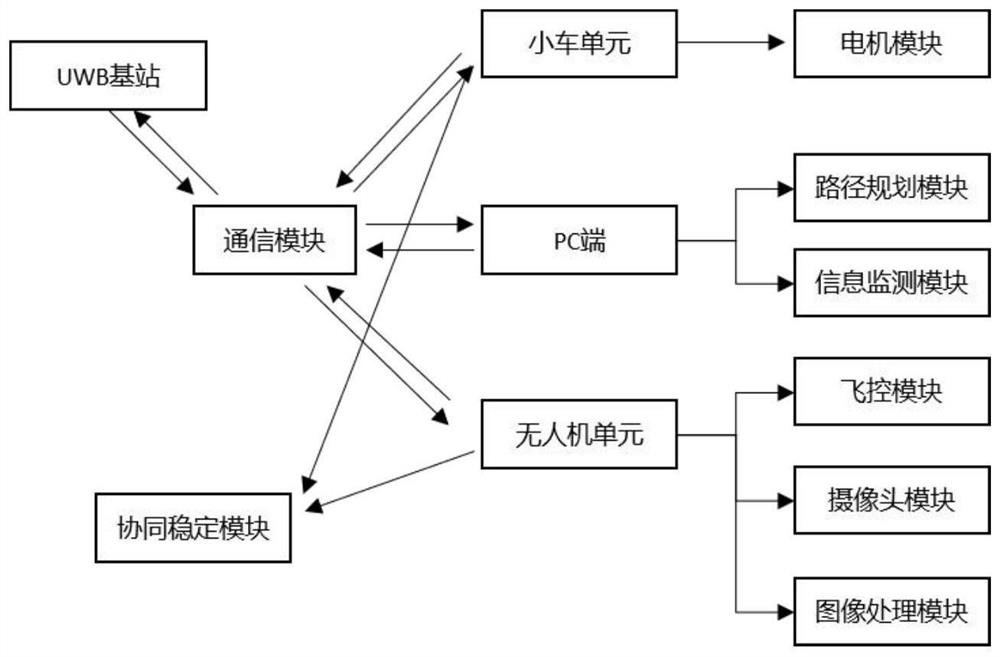
[0041] figure 1 The structural diagram of the UAV-assisted smart car driving system based on indoor positioning proposed in this embodiment includes a smart car unit, a UAV unit, a PC terminal, a UWB base station and a UWB positioning tag; wherein,
[0042] The smart car unit has electric drive and direction control functions, and is equipped with a signal receiving device, which completes the designated tracking route by receiving instructions from the PC terminal;
[0043] The UAV unit collects images of the surrounding environment of the smart car through the camera module on board, preprocesses the collected images and sends them to the PC. The man-machine unit adjusts the flight attitude according to the control commands issued by the PC;
[0044] The UWB positioning tag is set on the smart car unit and the UAV unit, and continuously sends UWB positioning pulses;
[0045] There are three UWB base stations, and the three UWB base stations respectively measure the UWB pos...
Embodiment 2
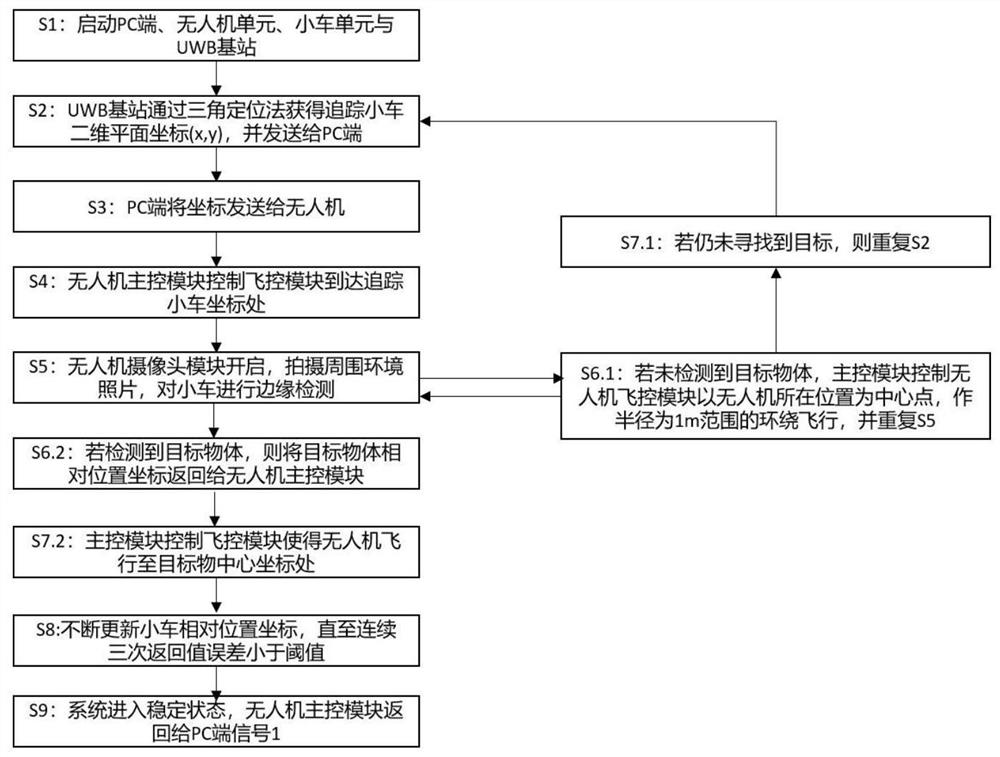
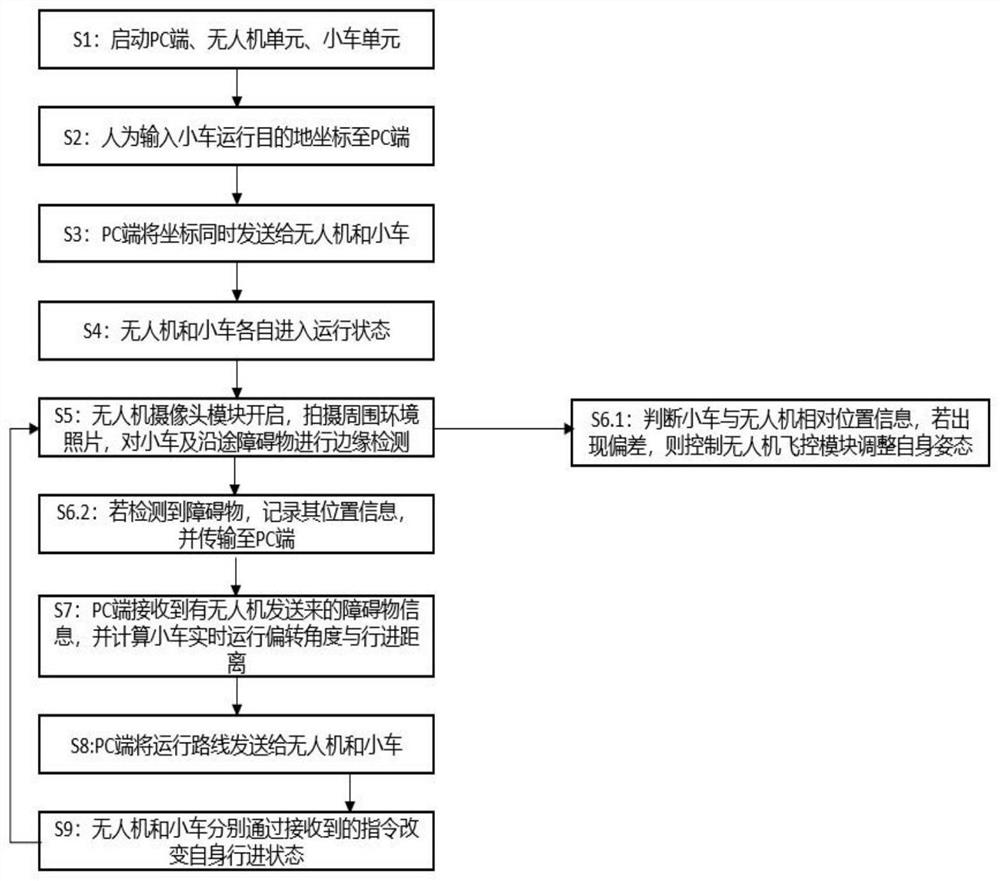
[0049] Based on the UAV-assisted smart car driving system based on indoor positioning proposed in Embodiment 1, this embodiment proposes a UAV-assisted smart car driving method based on indoor positioning. The method is generally divided into two processes. The first is The drone finds the smart car process, and the second is the drone-guided smart car obstacle avoidance process.
[0050] The process of drones looking for smart cars is as follows figure 2 shown, including the following steps:
[0051] (1) Construct a grid map of the site, and set artificial landmarks in the grid map;
[0052] (2) Set up the UWB base station in the field, and mark the coordinates of the UWB base station in the grid map;
[0053] (3) loading the grid map processed in step (2) to the PC;
[0054] (4) The PC terminal, UWB base station and UWB tags form a UWB positioning system, and the TOF algorithm is used to estimate the position of the UWB positioning tags, so as to realize the preliminary ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More