Injury robot gait self-learning fusing biological inspiration and deep reinforcement learning
A technology of reinforcement learning and biological inspiration, applied in the field of self-learning of gait of hexapod robots in injury state, which can solve the problems of inability to establish robot models in advance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
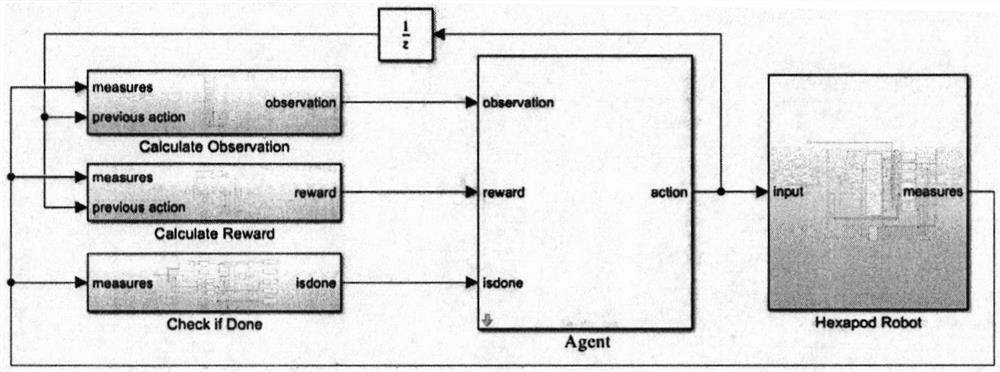
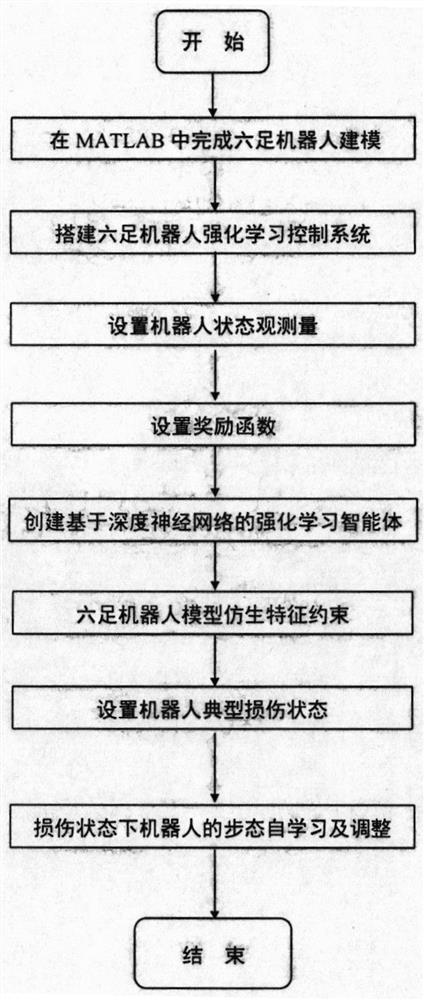
[0031]In order to make the technical solutions of the present invention more clearly, the present invention is further illustrated in connection with the accompanying drawings.figure 1 The six-legged robot to strengthen the learning control system is given.figure 2 A flow chart of the method is given. include:
[0032]1, six-foot robot modeling and strengthening learning control system
[0033]First use SolidWorks mechanical structural design and assembly, and generate files in URDF formats. Import the file in the URDF format into MATLAB, generate six foot robots 3D simulation models via the SIMSCAPE MULTIBODY toolbox. After completing the robot 3D model, build a six-foot robot to strengthen the learning control system in SIMULINK (figure 1 ), And set the control system related parameters, the specific parameters are shown in Table 1.
[0034]Table 1
[0035]
[0036]
[0037]2, set the status value and action value
[0038]The status value information selected by the present invention includes: robot j...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com