

Multi-rotor unmanned aerial vehicle cluster visual landing method based on fuzzy control
A multi-rotor UAV, fuzzy control technology, applied in non-electric variable control, altitude or depth control, control/regulation systems, etc., can solve the problems of waste of manpower and space, unable to meet the large-scale, fast and accurate landing of clusters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The present invention will be described in detail below in conjunction with the accompanying drawings.
[0053] 1. UAV cluster landing sign and landing sign layout design
[0054] (1) UAV cluster landing logo design
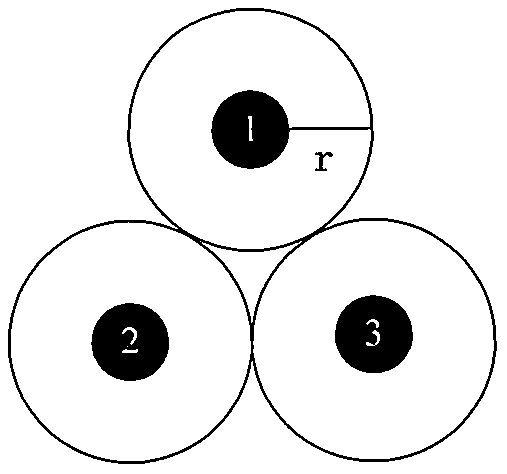
[0055] The landing sign adopts a red circle (ie figure 1 The numbers "1", "2"...in the dark circle, not the big circle outside the dark circle), there are Arabic numerals in the red circle, each circle has a number, and the number is not repeated. The drone finds its own landing position by identifying red circles with different numbers.
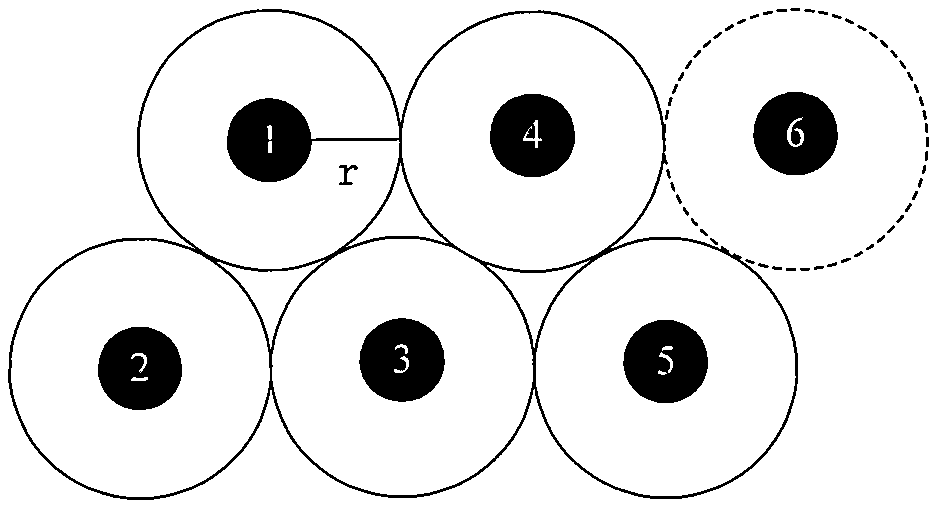
[0056] (2) Layout design of UAV cluster landing signs
[0057] For UAV swarm landing, adopting a suitable landing sign layout in a limited landing area can ensure safer UAV landing, which is conducive to accommodating more UAV landings and facilitates the scale of UAV swarms. increase.
[0058] Landing sign layouts include linear layout, circular layout, triangular layout, square layout, etc. Cluster landings shoul...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More