

A robot that can quickly walk on flat ground, overcome obstacles, and climb stairs
A robot and ground-leveling technology, which is applied to motor vehicles, transportation and packaging, etc., can solve problems such as fast crawling, slow stair climbing, complex structure, etc., and achieve the effect of simple structure, high intelligence level, and simple control process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
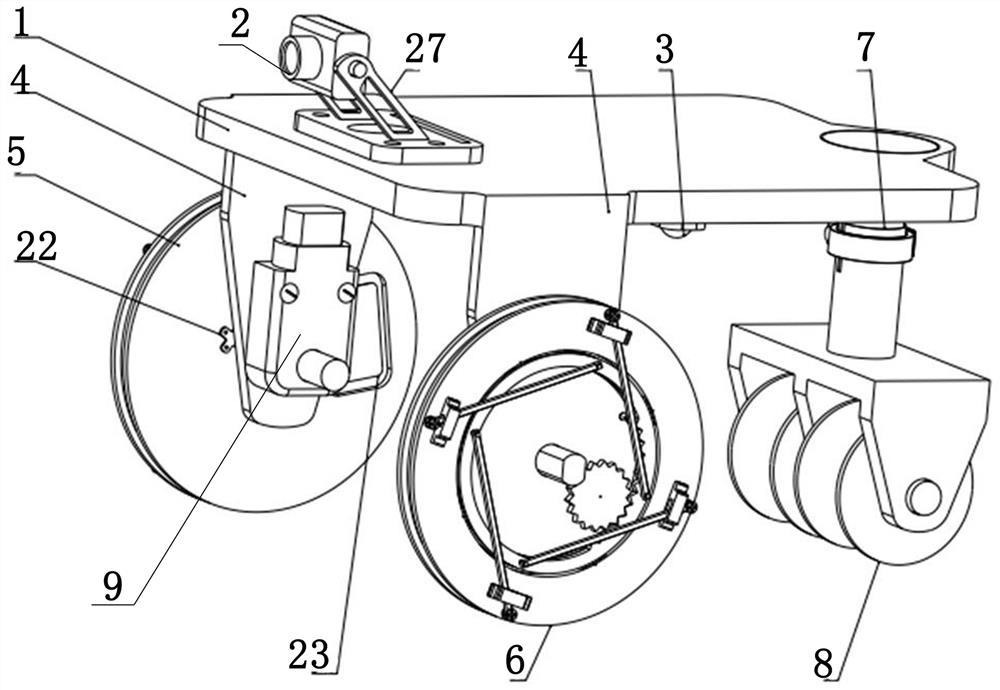
[0030] refer to Figure 1-Figure 9 , a detailed description is given of a robot that can quickly walk on flat ground, overcome obstacles, and climb stairs according to the present invention.
[0031] A robot that can quickly walk on the ground, overcome obstacles, and climb stairs, such as figure 1 As shown, it includes a loading platform 1, on which a target recognition probe 2 and a master control system 3 are fixedly connected, and the front side of the loading platform 1 is respectively connected with a left front wheel 5 and a left front wheel through two first supports 4. The right front wheel 6, the rear side of the cargo platform 1 is connected with at least one rear wheel 8 through the second support member 7; the first support member 4 is respectively fixed with a drive for driving the left front wheel 5 and the right front wheel 6 to rotate The motor 9; the left front wheel 5 and the right front wheel 6 have the same structure and both include a cylindrical wheel b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More