

Interventional surgery robot and its control system based on intelligent structure
An intelligent structure, interventional surgery technology, applied in the field of surgical robots, can solve problems such as poor flexibility, insufficient precision, and insufficient doctor liberation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
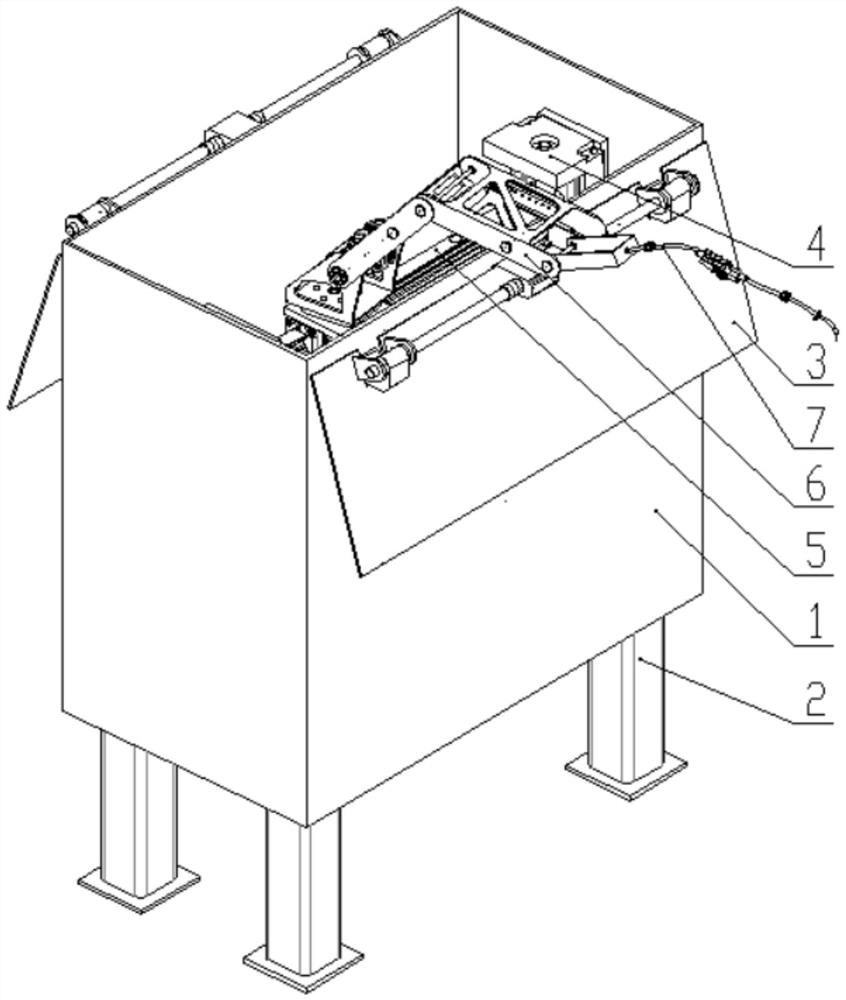
[0052] Such as Figure 1-Figure 22 As shown, an interventional surgery robot based on an intelligent structure includes a box assembly 1, a lifting column assembly 2, a door assembly 3, a Z-axis linear module assembly 4, a Y-axis linear module assembly 5, an interventional robot assembly 6 and The end effector assembly 7, a plurality of lifting column assemblies 2 are connected to the lower end of the box assembly 1, and the inside of the box assembly 1 is installed with a Z-axis linear module assembly 4, and the Z-axis linear module assembly 4 is provided with a vertically movable The Z-axis linear module assembly lifting platform 28, the Z-axis linear module assembly lifting platform 28 is connected with the Y-axis linear module assembly 5, and the Y-axis linear module assembly 5 is provided with a Y-axis linear module assembly slide that can move laterally. Table 38, the Y-axis linear module assembly sliding table 38 is connected to one end of the interventional robot assem...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More