

Front axle assembly for drive-by-wire chassis of unmanned vehicle
A technology of unmanned vehicle and front axle assembly, applied in the directions of axles, wheels, vehicle components, etc., can solve the problem of long steering torque transmission path, double cross universal joint transmission energy loss, and reduced steering response speed of steer-by-wire machines. and other problems, to achieve the effect of improving driving stability and safety, increasing space utilization, and improving steering response speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention.
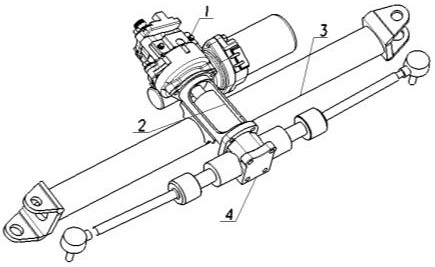
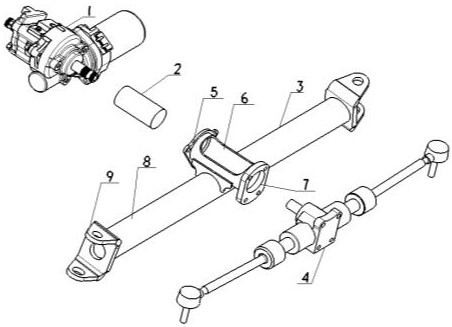
[0013] Such as Figure 1-2 As shown, a front axle assembly for an unmanned vehicle by wire chassis includes a support assembly 3, and also includes a wire steering gear 1, a coupling 2 and a mechanical steering gear 4; the wire steering gear 1 It is coaxially connected with the mechanical steering gear 4 through the shaft coupling 2, and the wire control steering gear 1 and the mechanical steering gear 4 are fixed on the support assembly 3.
[0014] Preferably, the support assembly 3 is composed of a support 5 , a bushing 6 , a fixed seat 7 and a main beam 8 ; the support 5 is fixedly connected to the steer-by-wire machine 1 , and the fixed seat 7 is fixedly connecte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More