

Tracer for navigation operation and positioning method
A positioning method and tracker technology, which is applied in the direction of surgery, surgical manipulator, surgical navigation system, etc., can solve the problems of limited movement of the robotic arm, small system tracking range, and inability to track in all directions, and achieve precise robotic arm coordinates The effect of positioning, saving medical costs, not easy to interfere or collide
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
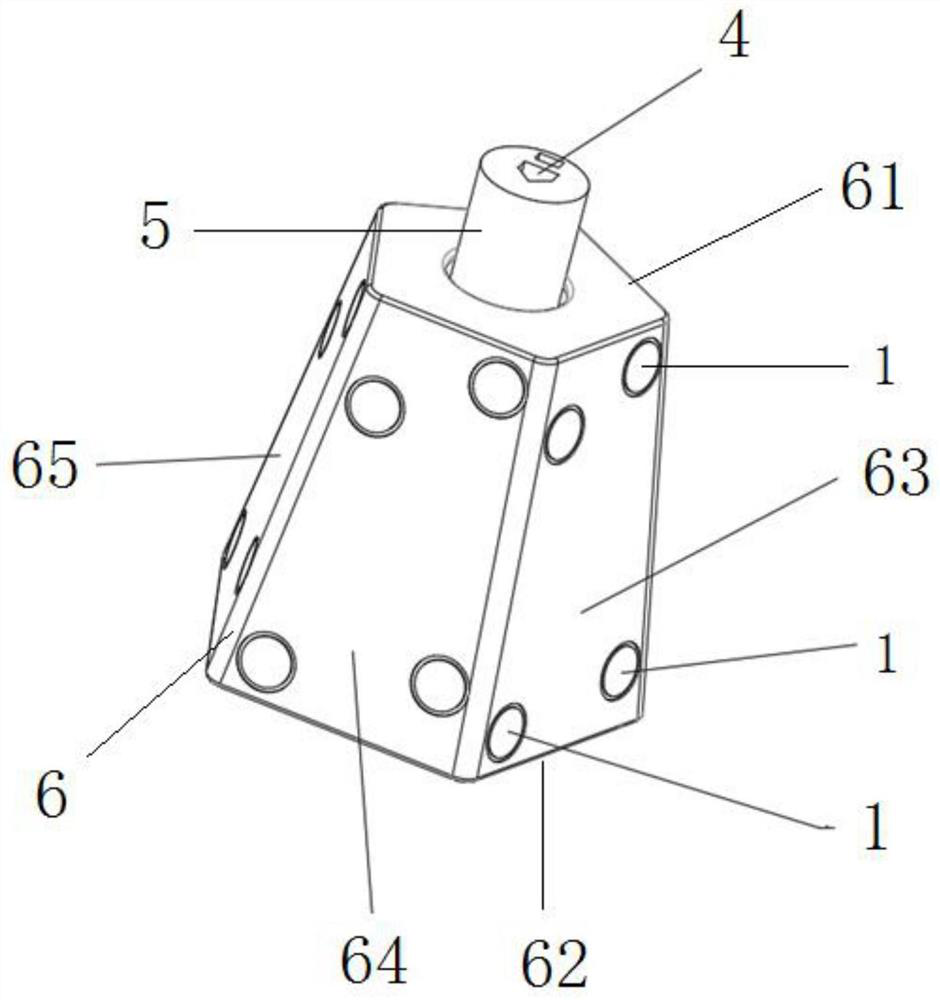
[0044] The tracker used for navigating surgery in this embodiment is installed at the end of the mechanical arm of the surgical robot, such as figure 1 As shown, it uses five trapezoidal reflective surfaces, such as figure 1 Middle trapezoidal reflective surfaces 63, 64, 65. Four circular reflective sheets 1 are pasted on each trapezoidal reflective surface, the top connection interface 4 is used to install the sleeve, and the bottom is installed on the mechanical arm. The axis 5 is set at the center of the approximately prismatic tracer body 6, the tracer body 6 consists of a pentagonal upper end face 61, a corresponding pentagonal lower end face 62, and five trapezoidal reflective surfaces all over the periphery Composition, the circumference length of described upper end surface 61 is less than the circumference length of described lower end surface 62, and each described trapezoidal surface has an inclination angle from the upper end surface to the lower end surface, and...
Embodiment 2
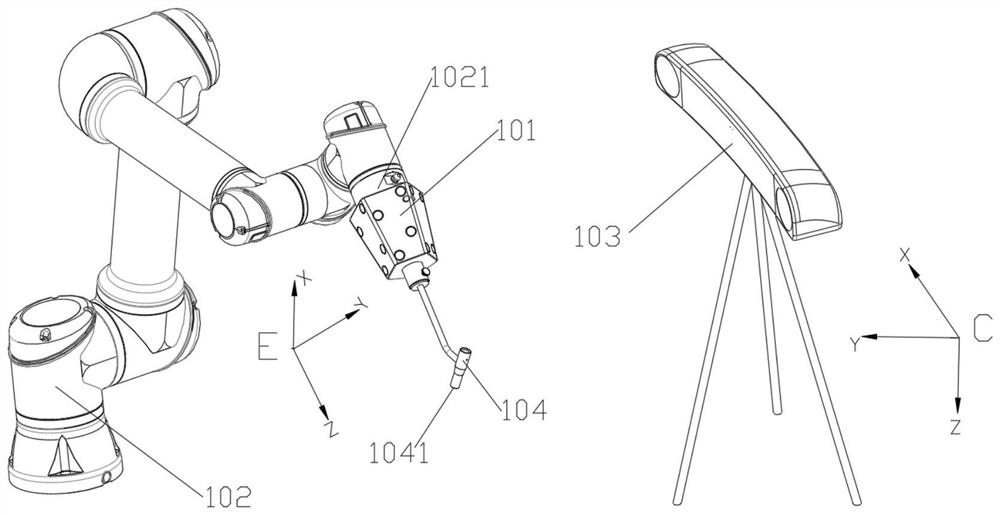
[0048] Such as figure 2 101 in the figure is the tracer used in Example 1, 102 is the robotic arm used in the navigation surgery, 103 is the optical tracker used in the navigation surgery, and 104 is indirectly fixed to the end flange 1021 of the robotic arm 102 through the tracer 101 The sleeve, where 1041 is a point on the sleeve, this example shows how to locate the point 1041.
[0049] Suppose the coordinate system of the optical tracker is C, the coordinate system at the end of the mechanical arm is E, the number of circular reflective sheets on each trapezoidal surface of the tracker 101 is 4, and each trapezoidal surface of the tracker 101 The coordinates of the center point of the circular reflective sheet 1 on the surface in the coordinate system E can be measured in advance.
[0050] The specific steps of the positioning method are:
[0051] Step 1: Fix the tracer 101 of the present invention to the flange 1021 at the end of the mechanical arm, and fix the sleeve ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More