Motor target prediction torque obtaining method and motor control system
What is AI technical title?
AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A target prediction and target torque technology, applied in the control system, DC motor speed/torque control, motor generator testing, etc., can solve the problems of complex interpolation methods, large ECU resources, and occupancy
Active Publication Date: 2021-07-06
UNITED AUTOMOTIVE ELECTRONICS SYST
View PDF9 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
The accuracy of this scheme to calculate the predicted torque of the motor is limited due to errors in linear interpolation
[0013] (2) In actual work, the motor supplier may not be able to provide an accurate efficiency table considering different factors, and the accuracy of the motor's predicted torque will be greatly reduced under the premise of inaccurate efficiency calculations
Even if the accuracy of the motor efficiency meter can be guaranteed, it is only the result of static measurement on the bench, and the motor working mode and working environment in the 48V system are constantly changing, and there are certain errors in the sensor signal, and these errors add up. It will have a considerable impact on the final torque prediction value calculation results
Although the predicted torque has been adjusted through closed-loop control, the phenomenon of battery overcurrent in a short period of time is still unavoidable, and the cumulative effect over a period of time will affect battery life.
[0014] (3) The method of interpolation after looking up the table is more complicated, such as 4 different temperatures, 4 different voltages, and the motor is working in two modes of power generation and driving, then there are 4*4*2=32 efficiency tables, which not only takes up a lot ECU resources also increase the difficulty of calibration
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
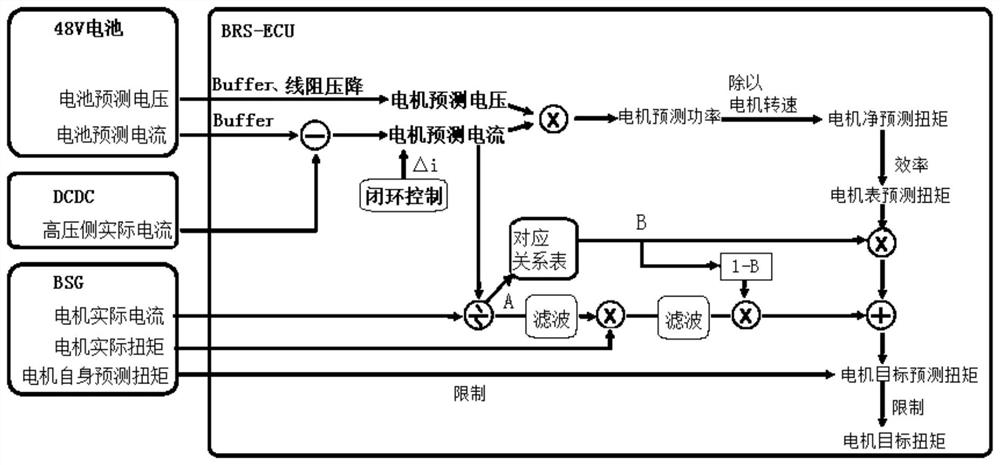
[0064] Such as image 3 As shown, the motor target prediction torque obtaining method includes the following steps:
[0065] 1. Calibrate the A / B correspondence table, and calibrate the motor efficiency table;
[0066] In the A / B correspondence table, B increases with the increase of A; 1>B>0; when A>C1, B>0.8, C1>2; when A
[0067] In the motor efficiency table, each set of speed and power corresponds to a motor efficiency;
[0068] 2. Obtain the predicted motor voltage u pred , Motor predicted current i pred , motor speed n, motor actual current i act , Motor actual torque Tq act ;
[0069] 3. Predict the voltage u according to the motor pred , Motor predicted current i pred Calculate the predicted motor power P pred ,P pred = u pred × i pred ;
[0070] According to the predicted power P of the motor pred , Motor speed n Check the motor efficiency table to get the predicted motor efficiency η pred ;
[0071] According to the predicted pow...
Embodiment 2
[0084] Based on the motor target predicted torque obtaining method of Embodiment 1, it also includes step 5, according to the motor's own predicted torque Tq uploaded by the motor spred , for the motor target predicted torque Tq pred Limit to get the motor target torque Tq aim ;
[0085] When Tq spred >Tq pred ,Tq aim =Tq spred ;
[0086] When Tq spred ≤Tq pred ,Tq aim =Tq pred .
[0087] Preferably, C1=3; C2=1.2.
[0088] The motor's own predicted torque Tq uploaded by the motor spred , represents the motor capability, limiting the motor target predicted torque Tq pred Get the final motor target torque Tq that controls the motor work aim .
Embodiment 3
[0090] Based on the motor target predicted torque obtaining method of Embodiment 1, in step 4, the actual predicted torque Tq calculated with the actual torque pred,act ,Tq pred,act =A×Tq act , after filtering and smoothing through a filtering module, and then multiplied with (1-B).
[0091] The method for obtaining the motor target predicted torque of the third embodiment, using the actual predicted torque Tq calculated by the actual torque pred,act , is filtered and smoothed by a filter module, and then multiplied by (1-B), so as to avoid possible fluctuations in the actual torque and actual current of the motor, resulting in inaccurate motor target predicted torque.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention discloses a motor target prediction torque obtaining method. The method comprises calibrating an A / B corresponding relation table and a motor efficiency table; calculating according to the motor predicted voltage uppred and the motor predicted current ipred to obtain motor predicted power Ppred, and checking a motor efficiency table according to the motor predicted power Ppred and the motor rotating speed n to obtain motor predicted efficiency eta pred; obtaining a motor table prediction torque Tqpred, map according to the motor prediction power Ppred, the motor rotation speed n and the motor prediction efficiency eta pred; calculating to obtain A according to the motor predicted current ipred and the motor actual current iact; checking an A / B corresponding relation table according to A to obtain B; and according to the predicted torque Tqpred, map of the motor table and the actual torque Tqact, A and B of the motor, obtaining the target predicted torque Tqpred of the motor, nammely Tqpred = Tqpred, map * B + A * Tqact * (1-B). The invention further discloses a motor controlsystem. The precision of the target prediction torque Tqpred of the motor is improved, meanwhile, the calculation amount is reduced, the calculation space of the controller is saved, and it is avoided that the service life of the battery is shortened due to over-current of the battery.
Description
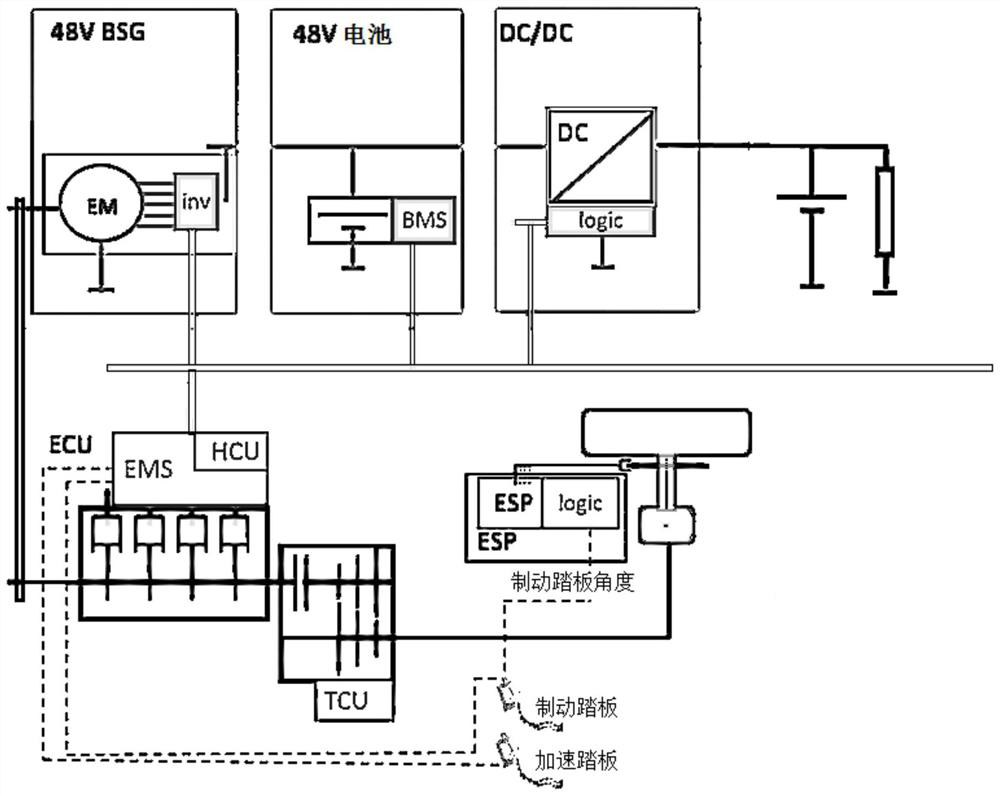
technical field [0001] The invention relates to new energy vehicle technology, in particular to a method for obtaining a motor target predicted torque and a motor controlsystem. Background technique [0002] The 48V micro-hybridsystem, as a more realistic and feasible energy-saving and emission-reduction method, has been highly praised by car companies and parts manufacturers in the past two years. [0003] According to the position of the motor in the power vehicle system, the 48V micro-hybrid system can be divided into P0, P1, P2, P2.5, P3, P4, EV and other configurations. [0004] The 48V P0 system belongs to the basic scheme of the 48V system, which is simple to implement and low in cost. The system mainly reduces fuel consumption through idling start-stop and braking energy recovery. The power improvement is achieved through the 48V motor assist. The realized functions are mainly as follows: [0005] (1) Idling start-stop function --- The stop condition is met, an...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More