Amphibious cross-medium aircraft and cross-medium control method thereof
A technology for amphibious straddle and aircraft, which is applied to aircraft, vehicles that can be converted into airplanes, rotorcraft, etc., and can solve the problem of immature and reliable realization of cross-medium flight, unmanned aerial vehicle platforms have arduous tasks, and cannot be mass-produced and put into operation and other issues, to achieve the effect of less difficulty in implementation, avoidance of inherent contradictions, and low implementation cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
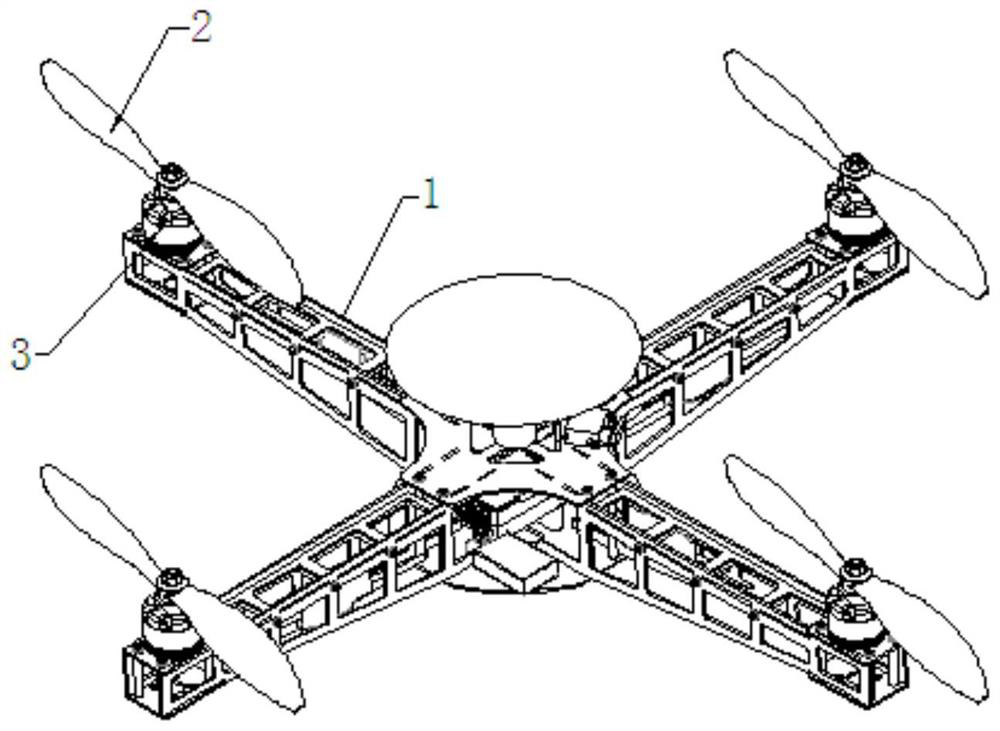
[0044] This embodiment provides an amphibious cross-medium aircraft, see figure 1 , the cross-medium aircraft is a multi-rotor structure, the number N of rotors 1 is an even number, and N≥4, such as quadrotors, hexacopters, octarotors, etc. The power system of the cross-medium aircraft includes n*N power units, n is a positive integer, n power units are installed on each rotor 1, such as a six-rotor UAV, each rotor is equipped with dual power, and there are 12 power units in total. indivual. The even-numbered design of the power unit ensures that no spinning torque will be generated when the power system is working.
[0045] The power unit includes a propeller 2 and a motor 3 for driving the propeller 2. The total power of each motor in the power system is P≥3P1, and P1 is the total power of each motor in the power system required by the cross-medium aircraft in a hovering state. called hovering power. Since the total power of the power system is generally evenly distribute...
Embodiment 2
[0064] Based on the same inventive concept, this embodiment provides a cross-medium control method applied to the above-mentioned amphibious cross-medium aircraft, including a water entry control method and a water exit control method.
[0065] The water entry control method specifically includes the following steps: controlling the cross-medium aircraft to hover above the water surface through a power system; controlling the power of the power system to reduce the height of the cross-medium aircraft until the cross-medium aircraft enters the water, and slows down when entering the water. After the aircraft enters the water, the power can be adjusted for underwater manipulation.
[0066] The water outlet control adopts a dynamic water outlet control strategy, adjusts the parameters of the motor and propeller in the power system, so that the thrust of the power unit when it is in the air is smaller than that when it is in the water, and controls the motor of the power system to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More