

Vehicle lateral and longitudinal stability control method under extreme conditions considering the control area
A stable control method and control area technology, applied in the direction of control drive, vehicle components, electric vehicles, etc., can solve the problems of limiting the application potential of the control area, ignoring the coupling nonlinear relationship, and not being able to guarantee the real-time performance of the control system, so as to achieve the realization of vehicle Horizontal and vertical stability control, the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
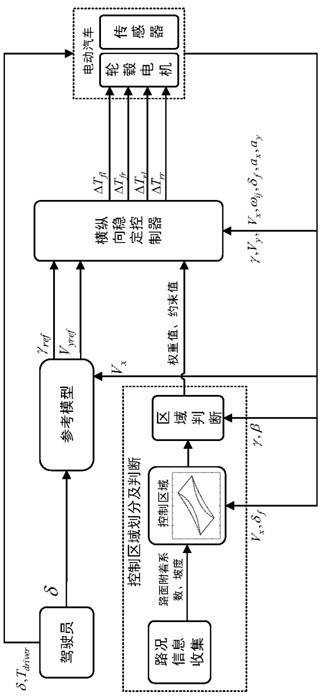
[0104] The coordinated control of the vehicle's lateral and longitudinal stability under the extreme working conditions considering the stability region is implemented through soft
[0114] The present invention provides a set of devices based on the above operating principles and operating procedures. Build and run
[0121]
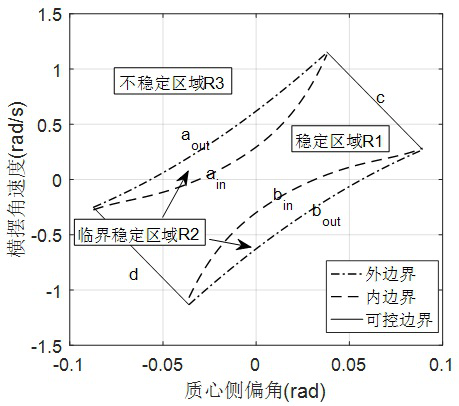
[0125] As mentioned earlier, the introduction of control regions can better describe vehicle handling and stability performance, compared to off-line regions.
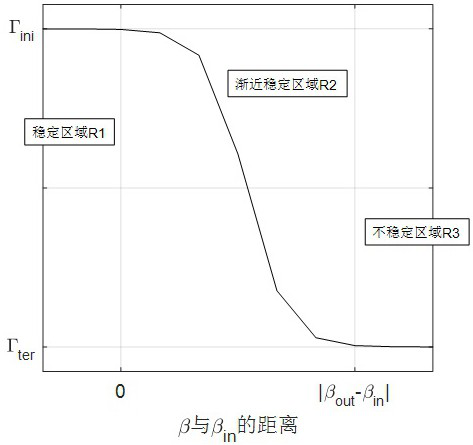
[0126] For the situation that the vehicle state may be in different regions, the control requirements that need to be met will also change accordingly.
[0128]
[0131] For the constraints of each region, if (β, γ) ∈ R1, there is no lateral constraint, when (β, γ) ∈ R2-R3, the lateral speed
[0135]
[0136]
[0138] Also for wheel roll, the dynamics hold, where ω represents the wheel speed. Longitudinal dimensions of known tires
[0139]
[0142]
[0145]
[0147]
[0148]
[0149]
[0150]
[015...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More