

Rapid and high-accuracy NAO type soccer robot visual processing method
A football robot, high-accuracy technology, applied in image data processing, processor architecture/configuration, instruments, etc., can solve problems such as increased difficulty, redundancy, and insufficient performance, and achieve the effect of increasing efficiency, accuracy and efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0037] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
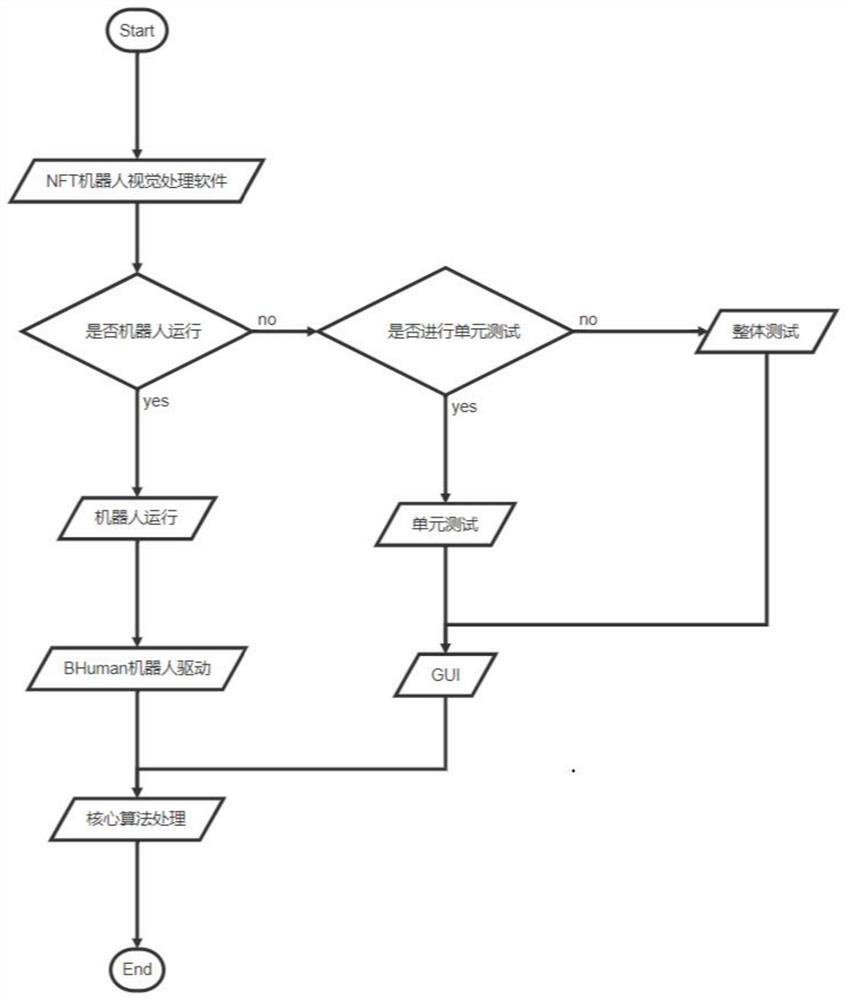
[0038] see Figure 1-8 , the present invention provides a technical solution: a fast and high-accuracy NAO type soccer robot vision processing method, said method adopts two driving strategies through two different operating modes, and the specific implementation steps are as follows:
[0039] For NAO robots run:
[0040] First of all, it is necessary to run NAOqi and BHuman robot drive systems, and write embedded data acquisition modules for the systems, and then...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More