

Self-adaptive passive cleaning robot for flammable and explosive dust pipelines
A cleaning robot, flammable and explosive technology, applied in the direction of cleaning hollow objects, cleaning methods and utensils, chemical instruments and methods, etc. problem, to solve the problem of insufficient power, short axial dimension, and prevent easy wear
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
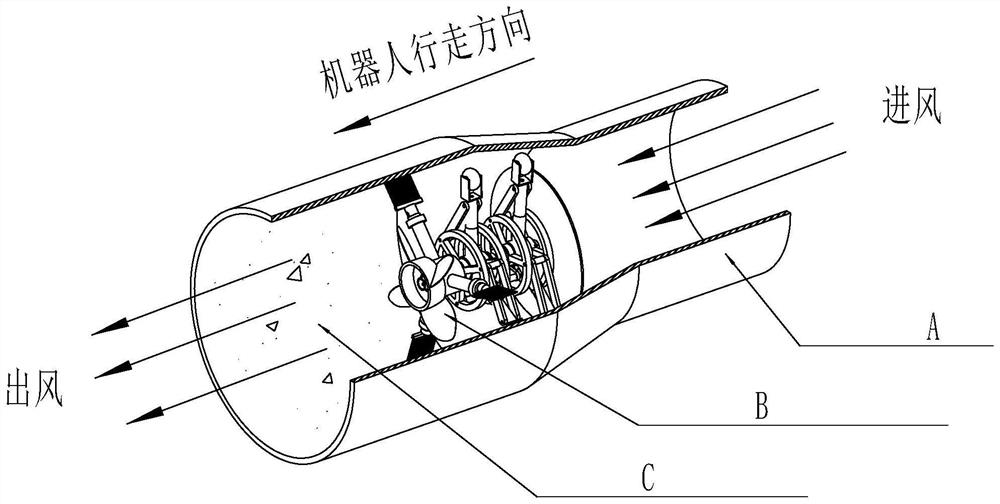
[0028] Such as figure 1 As shown, the cleaning robot B of the present invention is installed in a dust removal pipeline A with a variable inner diameter, and moves in the dust removal pipeline A along the direction of wind flow under the wind force to clean the dust C on the inner wall of the dust removal pipeline A.
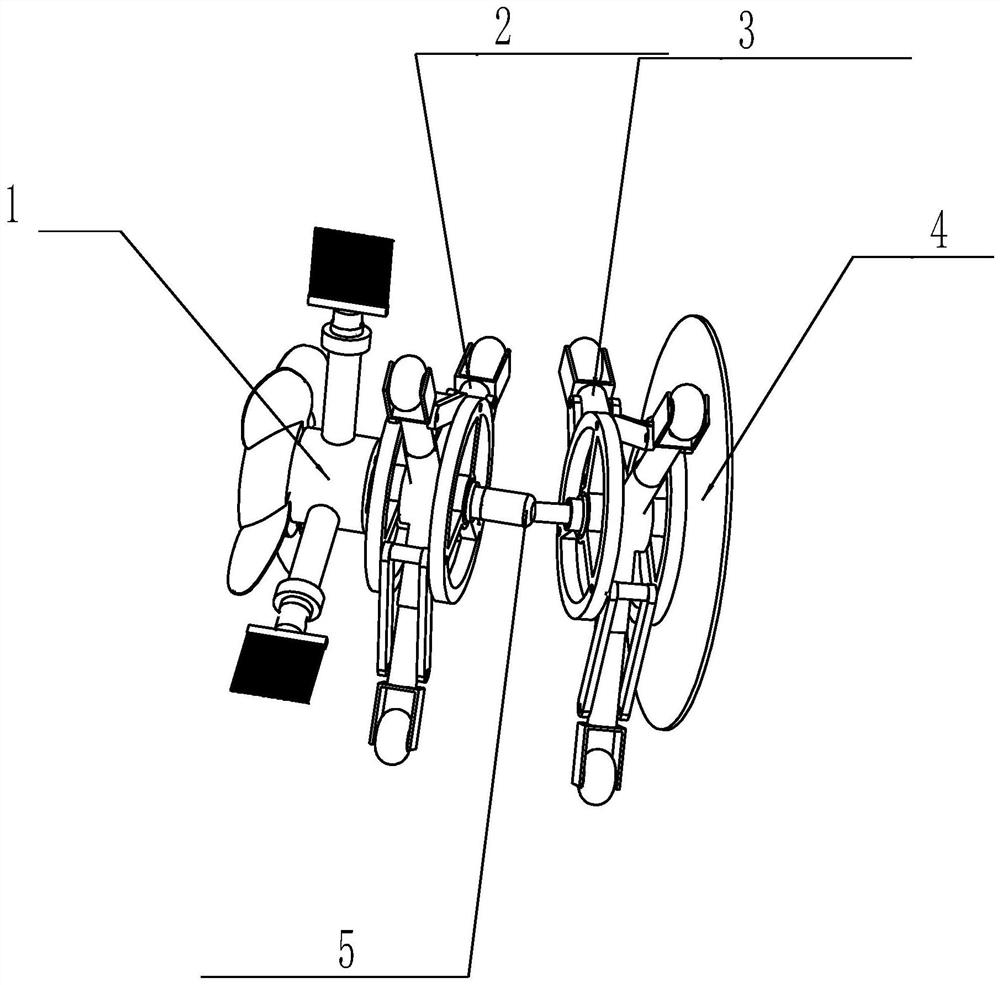
[0029] Such as figure 2 As shown, the cleaning robot includes a cleaning device 1, a first support device 2, a second support device 3, a pusher plate 4, and a flexible connector 5; The end of the dust removal pipeline A near the air outlet is hinged between the cleaning device 1 and the pusher plate 4 through two support devices; One end of the air inlet is coaxially connected with one end of the second support device 3, and the other ends of the first support device 2 and the second support device 3 are flexibly hi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More