

Self-adaptive control platform for grinding
A control platform and self-adaptive technology, applied in the control of workpiece feed movement, grinding machines, manufacturing tools, etc., can solve the problems of reduced grinding efficiency, affecting the quality of grinding, and the inability to accurately adjust the size of the processing contact surface, etc., to achieve change The effect of the size of the machining contact force and the small grinding contact force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
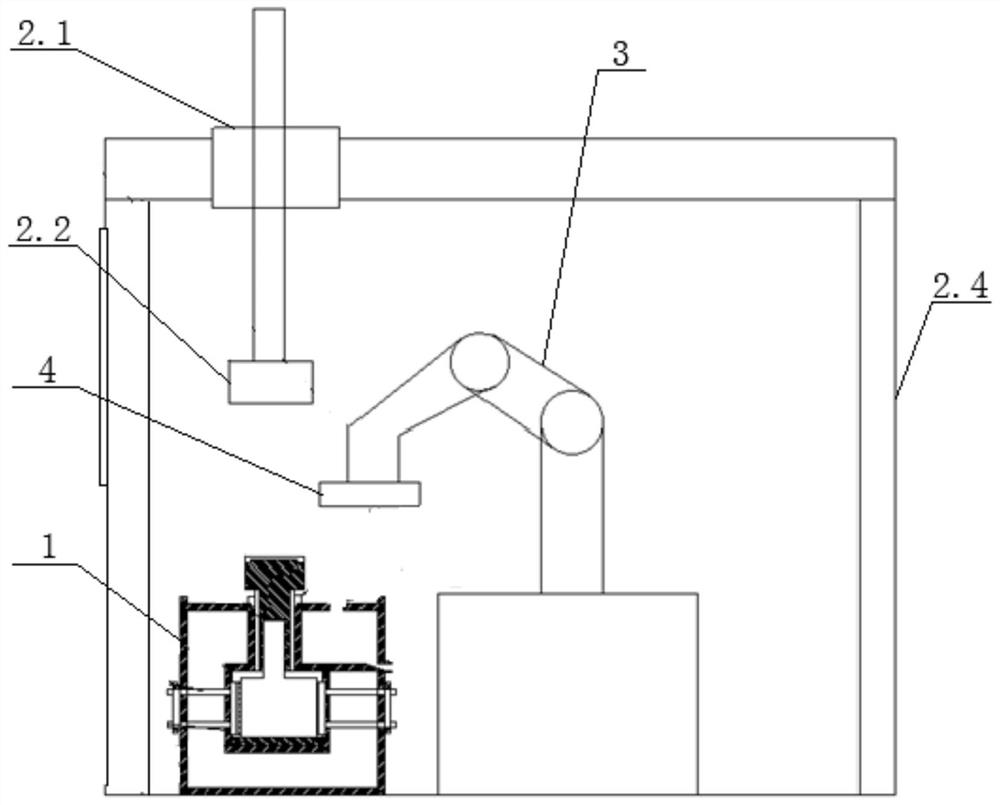
[0028] Embodiment 1: The pressure control device 1 is fixed in the bracket 2.4 of the image recognition processing device 2, the processing robot 3 is fixed in the bracket 2.4, and the grinding head 4 is fixed in the processing robot 3 ends.
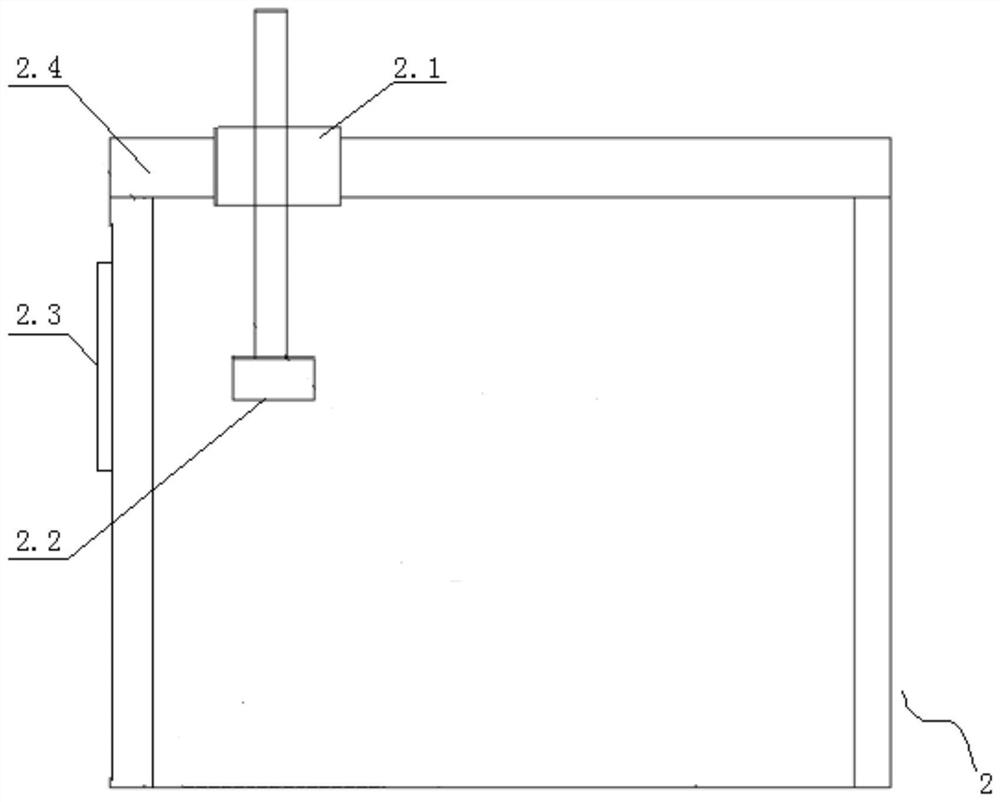
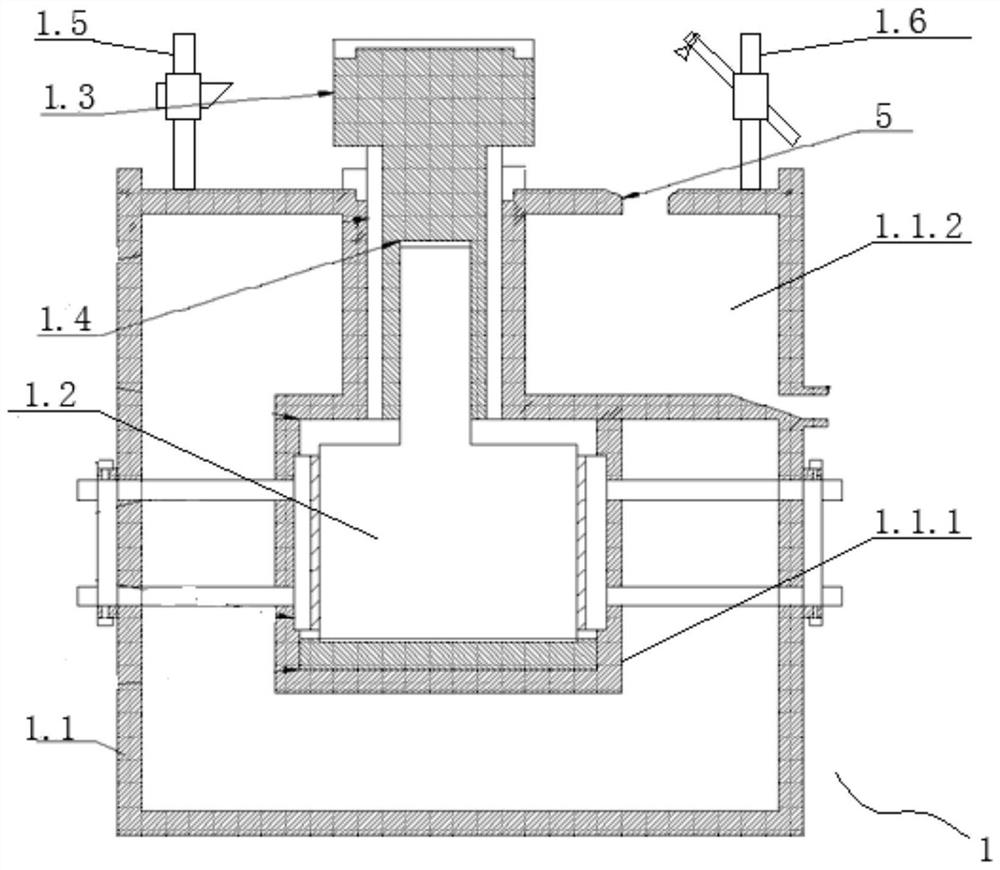
[0029] Pressure control device - 1; box - 1.1; embossed press placement box - 1.1.1; drainage chamber - 1.1.2; press - 1.2; processing table - 1.3; sensor - 1.4; hot blowing device - 1.5; Flushing device-1.6; image recognition processing device-2; slide table-2.1; camera-2.2; image processing device-2.3; bracket-2.4; processing robot-3; grinding head-4; drain hole-5.
Embodiment 2
[0030] Embodiment 2: When in use, the processing robot 3 is installed on the processing table 1.3, and the camera 2.2 is adjusted to a reasonable position through the sliding table, which is beneficial to feature extraction of the processing surface, and the processing robot 3 passes The grinding head 4 grinds the workpiece, and the lifting of the processing table 1.3 by the press 1.2 changes the size of the contact force between the grinding head 4 and the workpiece, and the camera 2.2 responds to different contact forces. The features of the polished surface are extracted and uploaded to the image processing device 2.3 to evaluate the processed surface, and the evaluation results and contact force are transmitted to the control system of the image processing device 2.3. To find the optimal grinding contact force based on the surface characteristics of the teaching staff.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More