

Cross-scene navigation method, device and storage medium
A navigation method and scene technology, applied in the field of robotics, can solve problems such as inconvenient map maintenance, inability to display a macro scene path map, and inability to reflect the order relationship of robot decision-making, and achieve the effect of improving efficiency and accuracy of navigation routes.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0024] The preferred embodiments of the present invention will be described below in conjunction with the accompanying drawings. It should be understood that the preferred embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
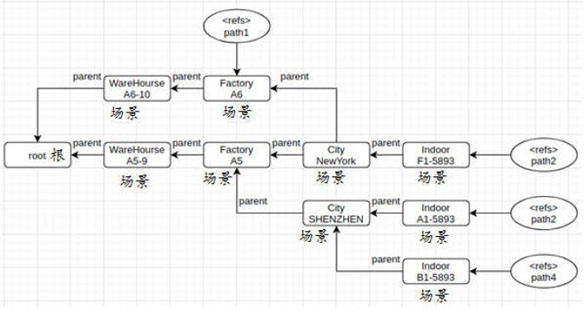
[0025] The present invention provides a cross-scenario navigation method, device and storage medium, and realizes a response based on git (git is an open source distributed version control system, which is used to quickly and efficiently handle any small or large projects) The map decision tree for cross-scene navigation solves the problems in the prior art that there is no navigation error correction function and map data management is chaotic during the application process of cross-scene maps.
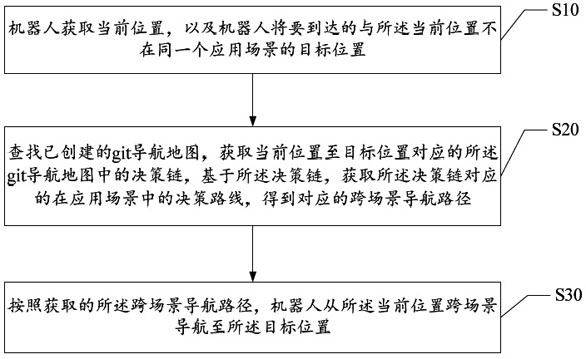
[0026] like figure 1 as shown, figure 1 It is a schematic flowchart of an implementation manner of the cross-scene navigation method of the present invention. exist fig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More