

Attitude control system and method for roadway unstructured space redundancy monitoring robot
An attitude control and unstructured technology, which is applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve problems such as inability to flexibly control manipulators and difficult determination of joint rotation angles, and achieve good and reliable movement flexibility and stability High performance and good reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
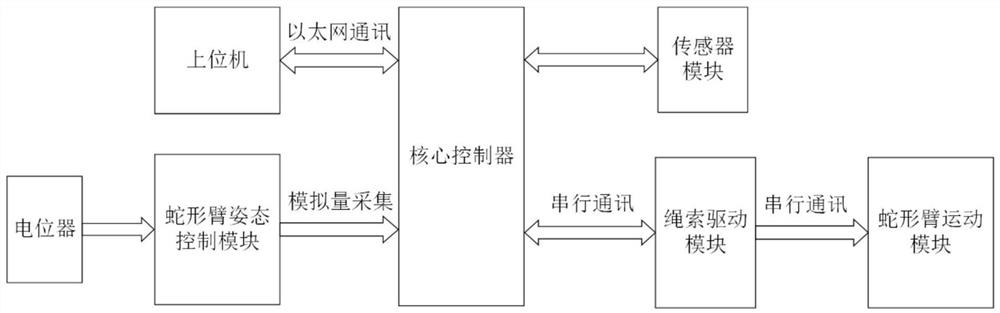
[0056] In the first aspect, the application proposes a robot attitude control system for unstructured space redundancy monitoring of shafts, such as figure 1 As shown, including: core controller, host computer, sensor module, potentiometer, snake-arm attitude control module, rope drive module, snake-arm motion module;
[0057] The core controller is respectively connected with the upper computer, sensor module, snake-like arm attitude control module and rope drive module, the potentiometer is connected with the snake-like arm attitude control module, and the snake-like arm moves a module is connected to the cable drive module;
[0058] The core controller is used to receive the environmental information transmitted by the sensor module, receive the voltage values corresponding to the joint angles transmitted by the snake-like arm posture control module, and calculate the joint deflection based on the voltage values Angle, and further converted into a driving signal, the dri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More